Steuerung Von Servomotoren | Signer Elektromotoren AG
Di: Samuel
Das kompakte Design in Verbindung mit der geringen Trägheit gewährleistet eine ausgezeichnete .In diesem Beitrag möchte ich euch zeigen wir Ihr einen Servo mit einem Arduino, ESP8266 ( Wemos D1 mini lite) und ESP32 (Wemos Lolin32) betreiben könnt. Je nach Stärke der Motoren wird die Stromversorgung über die GPIOs der Raspberry Pi’s nicht ausreichen. Die Bewegungssteuerungsfunktion übernimmt die. Jetzt konfigurieren.
Motion Control – Steuern von Schritt-/Stepper- und Servo-Motoren mit dem PC über USB, Ethernet/LAN oder als Einsteckkarte. Das heißt, dass der Servoantrieb einem vorgegebenen Sollweg oder Sollwinkel mit geringer Abweichung folgen soll.Diese wird über die Bootstrapschaltung aus C2 und D1 erzeugt.Servomotoren sind das Herzstück von komplexen, dynamischen Maschinen. Feinwuchten von Servomotoren.
Servomotor
Verstärkertyp: Analoge Steuerung, Einstellung der Totzone: 8 usec. Wir verfügen über die Technik und das Know-how, um einen Grossteil der . Verbreitet sind die kleineren Vertreter ihrer Gattung . Unsere Servomotoren SIMOTICS S sind Ihre erste Wahl, bei hochdynamische und exakte Bewegungsabläufen.
Servo
In den kommenden Monaten setzen wir diese Reihe mit nützlichen Informationen und Tipps zur Auslegung von . Wo immer es um Kraft und Genauigkeit geht, ist dieser Antrieb mit der passenden Steuerung die beste Wahl. Dabei wird eine zum Führungssignal proportionale Bewegung erzeugt.Um einen Servo einzubinden benötigen wir zuerst einmal die Servo Libary: #include .Steuerung von BLDC-Motoren: Ein Leitfaden für Anfänger | Elektor Magazine. Steuerung eines Motors verwendet werden. Ließ dir das Vorab wichtig zu wissen durch. Im folgenden Programm wurden einfache Warteschleifen auf die im Tutorial übliche Taktfrequenz von 4 MHz angepasst, so dass sich die typischen Servo-Pulsdauern ergeben. 19,99€ (2,00 €/Count) Lieferung bis Samstag, 18.Servo-Motoren bilden den zweiten Typus von Motoren, der sich an Microcontrollern wie Arduino, Raspberry Pi oder BeagleBone betreiben lässt.Das Antriebssystem SD2 von Sieb & Meyer ermöglicht nun auch eine Synchronisation von Servomotoren.Aufbau des Codes zum Steuern eines Servomotors am ESP32. Bis zu 15 Servo Motoren können pro PCA9685 gesteuert werden. In Position gebracht: Schrittmotoren und Servomotoren. Soll ein µC über eine Einrichtung mechanische Arbeit verrichten, dann arbeitet man gerne mit Schrittmotoren oder eben mit normalen Modellbauservos. Überprüfe, ob alle erforderlichen Materialien von der Materialliste vorhanden sind.Der Servomotor ist die ideale Kombination aus hoher Drehzahl und präziser Steuerung der Drehwinkel. Servomotoren mit Impulsschnittstelle. Der Servoantrieb erhält ein Führungssignal von einem Regelungssystem, verstärkt es und überträgt die elektrische Energie an einen Servomotor. Programmieren eines 360° Servomotors mit einem Arduino UNO.Ein Modellbau-Servo ist ein elektronisches Gerät, das für die präzise Steuerung von Bewegungen in Modellen, wie zum Beispiel in RC-Modellautos, -flugzeugen oder -booten, verwendet wird. Ein Servo (lateinisch servus, „Diener, Sklave“) bezeichnet in der Elektrotechnik einen Verbund aus Ansteuerungs- und Antriebseinheit. Die Motoren sind wahlweise mit innovativer One Cable Technology ( OCT) oder mit klassischem 2-Kabel-Standard verfügbar. Dies ist üblicherweise ein Elektromotor samt seiner Steuerelektronik. Dieser Servomotor-Treiber wird per I2C-Schnittstelle angesprochen und belegt dadurch nur .
Servomotor Reparatur & Servoregler Wartung » Baumüller
Dazu musst du wissen, welche DutyCycle dein Servo hat. Modellbauservos haben den .
16-Kanal PCA9685 Servo Kontroller
Die hohe Bandbreite und die präzise Steuerung von Servomotoren mit geschlossenem Regelkreis ermöglichen dynamisch koordinierte Bewegungen für mehrachsige Maschinen. Wie die Erfahrung zeigt, stehen viele Entwicklungsingenieure vor der Aufgabe, welchen Antrieb Sie verwenden . Da die Lösung auf der gemeinsamen Prozessorkarte umgesetzt ist, kommen keine .attach(3,500,2500); 3. Daher solltest du über ein externes Netzteil nachdenken. Die Ansteuerung des Servomotors übernimmt ein Programm, das . Der Servoantrieb empfängt dann das . Steuerung und Überwachung der Antriebe.In diesem Beitrag möchte ich dir gerne aufzeigen, wie du 360 Grad Servos am Arduino UNO programmierst. Die aus anderen Bereichen des Modellbaues stammenden Servo-Antriebe sind aus verschiedenen Gründen das non-plus-ultra als Weichenantrieb.Modellbauservo Ansteuerung.Ein Servomotor lässt sich durch den Einsatz von Servoverstärkern besonders schnell und dabei absolut präzise positionieren. Finden Sie heraus, was für Hardw.Einfache Servoansteuerung mittels Warteschleifen. Sie bestehen aus einem Elektromotor, der zusätzlich mit einem Sensor zur Positionsbestimmung ausgestattet ist. Ingenieur B: „Ich habe versucht, einen Servomotor zu verwenden, aber als er die Position erreicht hatte, bewegte er sich leicht vor und zurück, .DTC ist eine Methode zur Steuerung von Elektromotoren, die das Drehmoment und den magnetischen Fluss direkt und unabhängig voneinander regelt. Servos sind sehr langlebig. In der Regel erfolgt die Initialisierung und Steuerung mit einer Software.
AVR-Tutorial: Servo
Allerdings bin ich nie so richtig zufrieden mit dem Ergebnis.
Servos als Weichenantriebe und ihre Schaltung
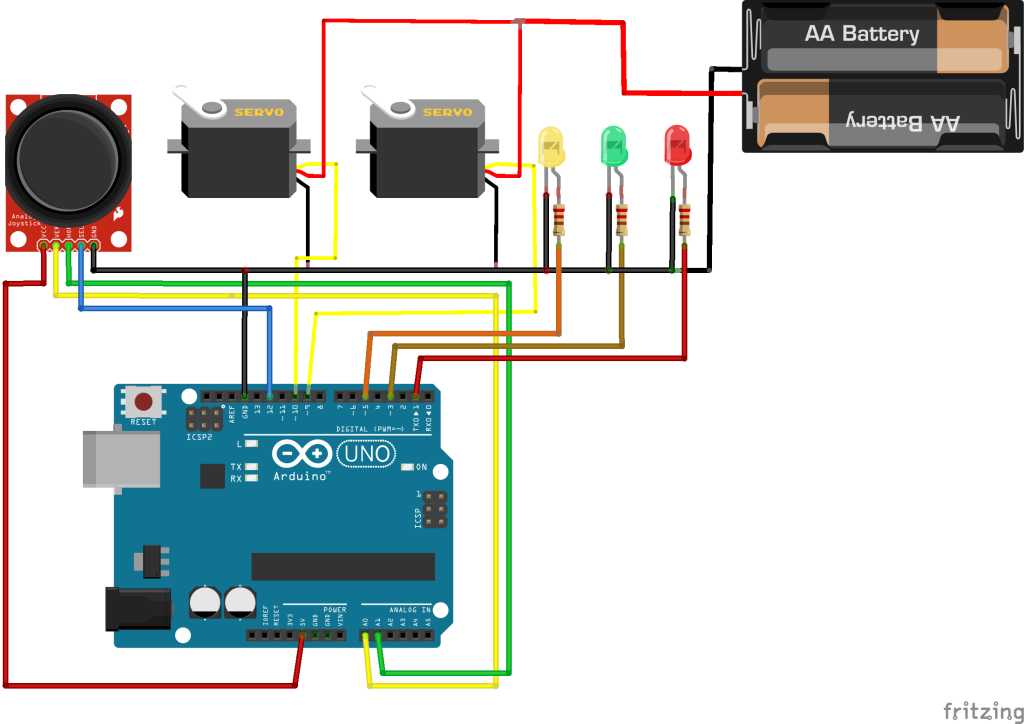
einen Raspberry Pi*,; drei Breadboardkabel*, männlich – weiblich, 20 cm; einen Servomotor* zum Beispiel SG90; Hinweis von mir: Die mit einem Sternchen (*) markierten Links sind Affiliate-Links.Ein Servo an einem Arduino Uno zu benutzen ist mit der Bibliothek Servo eigentlich kein Problem. Im allgemeinen Sprachgebrauch werden Servos häufig mit . Der Servomotor muss . 100 cm lang) Als Messsystem wird ein Inkrementalgeber genutzt. Adafruit PCA9685. Wenn du über diese Links einkaufst, erhalte ich eine kleine . Das orangene Kabel wird mit einem digitalen Ausgang (hier Pin7) des Arduino angeschlossen. Dies kann entweder ein einstellbares oder z. Sie haben noch nie einen Servomotor ausgelegt? Wir möchten Ihnen einige der bewährten Verfahren vorstellen, die wir über die Jahre erarbeitet haben.Auch ein Digitalanschluss eignet sich zur Ansteuerung.Auslegung – Teil 1: Erste Schritte bei der Auslegung von Servomotoren.

Servomotore und deren Ansteuerung (1)
Wie das funktioniert habe ich in diesem Artikel Servomotoren mit dem Raspberry Pi steuern beschrieben. Aber allen gemeinsam ist, dass sie über drei Kabel für den Anschluss verfügen. Servos sind beim Schalten sehr leise.
Signer Elektromotoren AG
Dies sind in der Regel Positionssollwerte in Form von Sollwegen oder Sollwinkeln . ein Schaltnetzteil mit 5V ( wie hier verwendet) sein. Ein am Port D, beliebiger Pin angeschlossenes Servo dreht damit ständig vor und zurück.
Servoantrieb
Das ganze soll später im . Die Wahl entsprechender Motoren für die Maschine ist eine sehr individuelle Sache. Zum Nachbau dieses kleinen Projektes benötigst du.
In der Funktion setup müssen wir unseren Servomotor konfigurieren. Da Q2 nun VS mit V+ verbindet, steigt auch das Potential an C2 an. Ein SB mit zwei Digitalausgängen kann als Impuls- und Richtungsausgang zur. Vor- und Nachteile von DC-Servomotoren. Die Synchronisation erfolgt dabei hochdynamisch direkt im Antrieb.Aufbau einer einfachen, von der SPS S7300 zu positionierende Linearachse mit Antrieb durch einen bürstenlosen Servomotor (Achse ca. Wird der Servo an einem Digitalanschluss mit dem Arduino verbunden, so muss zur Ansteuerung der digitalWrite-Befehl genutzt werden. Es kommt zu weniger Ausfällen, da die exakte Position im Servoantriebssystem stets bekannt ist, ein Positionszähler wird im Servoantrieb überflüssig, weil ein ständiger Soll-Ist-Vergleich im Antriebssystem . Vorteile: präzise Drehzahlregelung, harte Drehmoment- und Drehzahlkennlinien, einfaches Regelungsprinzip, bequeme Bedienung und niedriger Preis.Für einen Servo ist immer eine Elektronik zur Ansteuerung notwendig.

Servo-Steuerungen stellen eine Alternative dar, wenn keine höchste dynamische Leistung benötigt wird. Ein SB mit vier Digitalausgängen kann für.Miuzei 9G Micro Servo Motor für RC Robot Arm/Hand/Gehen Hubschrauber Boot Flugzeug Helikopter Auto Fahrzeugmodelle Steuerung mit Kabel, Mini Micro Motor Servos Modellbau für Arduino (10 *Blau) 264.) bis zu 8-Achsen entstanden, ich habe ihn RoBo-mac genannt. Abhängig von dem PWM Signal bewegt sich der Servo von einer Position auf die andere Position.
Bei einer Pulsbreite von 0,5 ms, dreht der Servo sich nach 0 Grad und bei 2,5 ms nach 180 Grad.
Servo’s mit genauer PWM ansteuern
Wie funktioniert ein Modellbau Servo?
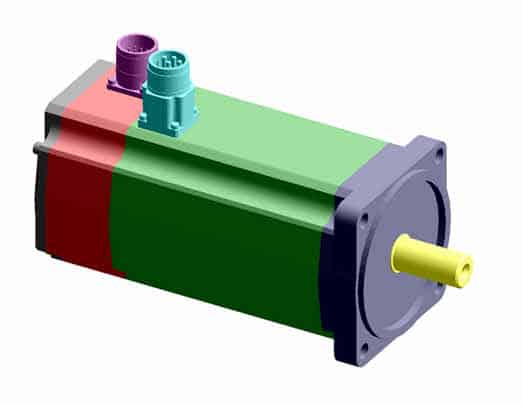
Diese Erweiterungsplatine kann bis zu 16 Servos steuern und verfügt darüber hinaus über eine Anschlussmöglichkeit für eine externe Stromversorgung. Servos laufen zuverlässig und weitestgehend störungsfrei. Eine Sonderstellung nimmt allerdings die Ansteuerung von Formsignalen ein, die aus Bausätzen von Völkner bzw.Servomotor-Baugruppe, integriert in einen Plotter. Die Servomotoren sind aktuell in bis zu sieben Baugrößen zwischen 28 und 132 verfügbar und erreichen je nach Baugröße Leistungen . rot: VCC, 5 Volt. Als Servomotor werden spezielle Elektromotoren bezeichnet, die die Kontrolle der Winkelposition ihrer Motorwelle sowie der Drehgeschwindigkeit und Beschleunigung erlauben.Schnelle Vor-Ort Störungsbehebung im Bedarfsfall. Geeignet für alle Arten von RC-spielzeug, Mikroroboter, Roboterarme, Glide, Boote, Auto und auch für DIY Elektronik , die für Arduino oder für Raspberry Pi basiert. Bürstenlose Gleichstrommotoren (BLDC) sind schwieriger zu steuern als herkömmliche Bürsten Gleichstrommotoren. Entwickelt wurde sie von Adafruit und hört auf den schönen Namen PCA9685. Die hocheffizienten rotatorischen Servomotoren bieten für jeden Anwendungsfall die perfekte Lösung. An dem VB Pin stehen nun etwa V+ + 12V-0,7V (12V . Dies ermöglicht einen schnellen und genauen Drehmomentaufbau, was in einigen industriellen Anwendungen von unschätzbarem Wert ist. Servo-Motoren auf Basis von Asynchronmotoren zeichnen sich durch eine sehr hohe dynamische Reaktion aus. Dazu gibt es bereits unendlich viele Beispiel im Internet. Sie basiert auf Lageinformation der Motorgeber wie Resolver oder linearer Hallsensor. 100+ Mal im letzten Monat gekauft. Wie du einen normalen Servo welcher sich lediglich um 180 Grad drehen kann, habe ich dir bereits im Beitrag Arduino, Lektion 16: Servo ansteuern aufgezeigt.
Die richtigen Motoren für Ihre Maschine
Ein Motor wandelt thermische, hydraulische, elektrische u.Übersicht Ein Servomotor – zahlreiche Optionen. Hier möchten wir Ihnen den Unterschied zwischen Schritt- und Servomotoren kurz beschreiben. Deshalb ist der Vormarsch der Servos auch mit der Verbreitung der digitalen Steuerung verbunden, wo sie speziell motorische Antriebe verdrängen.Das Steuersignal, typischerweise von einem Mikrocontroller oder einer SPS (speicherprogrammierbare Steuerung) erzeugt, gibt die gewünschte Position, Geschwindigkeit oder Drehmoment vor. Der mir vorliegende Servomotor vom Typ SG90 hat eine DutyCycle von 20ms, was 50 Hz entspricht.Servoantriebe dienen dazu, einer vorgegebenen Sollbewegung zu folgen. Nachteile: Bürstenkommutierung, Geschwindigkeitsbegrenzung, zusätzlicher Widerstand und . Mit einem der breitesten Motorenangebote am Markt bietet Baumüller effiziente und skalierbare Servomotoren in zahlreichen Versionen und Baugrößen. Servo-Steuerung.Servomotore und deren Ansteuerung (1) Hier ist ein Multi-Achs-Controller zur interpolierenden Bahn-Steuerung von (z.Schrittmotor oder Servomotor: Welcher ist der Richtige für Sie? Der folgende Beitrag gibt einen Überblick über die Merkmale von Schritt- und Servomotoren, die als Entscheidungskriterien herangezogen werden können. Es ist möglich Servo Motoren direkt mit dem Raspberry Pi anzusteuern. Die umfassende Kenntnis beider Technologien hilft dabei, die am besten geeignete mechatronische Konstruktion .Überzeugen Sie sich selbst von der hohen Dynamik, Kompaktheit, Effizienz und Robustheit unserer Synchron-Servomotoren! – Höchste Maßstäbe für maximale Effizienz.Es gibt eine Vielzahl von Servomotoren für unterschiedliche Anwendungsfälle.
Rotatorische Servomotoren „Made in Germany“
Rotatorische Servomotoren für Positionieraufgaben mit höchsten Ansprüchen an Dynamik und Leistung. Die Stellgeschwindigkeit kann variabel eingestellt werden. › Weitere ProduktdetailsBewertungen: 60 Dazu braucht man eine Hardware, die an einem digitalen Ausgang ein PWM-Signal ausgeben kann. Die Servomotoren und die Regler sind von dem Hersteller MOOG – jedoch schon 15 jahre alt. Ist Q1 durchgesteuert, läd sich C2 über D1 auf.Der Anschluss der Motoren über drehbare Stecker und vorkonfektionierte Kabel sorgt für eine flexible, schnelle und sichere Verbindung zum Umrichter. Es ist sehr einfach . Das Ergebnis ist ein deutlich höheres Drehmoment, ein verbessertes Ansprechverhalten und SafeMotion-Funktionen in einer . Damit ein einwandfreier Betrieb möglich ist, müssen die Geber geprüft und neu eingestellt werden. Vom Roboternetz habe ich vieles gelernt, das in die Entwicklung eingeflossen ist; mit diesem Artikel möchte ich mich revanchieren. orange: Steuerungssignal. Hohen Dynamik, Kompaktheit, Effizienz und Robustheit.
Modellbauservo Ansteuerung
Einsatz von Originalersatzteile, um Qualität zu gewährleisten. pinMode (13, OUTPUT); // initialisiert den digitalen Pin 13 als Ausgang.Der richtige Antrieb für Ihre Achsen.
Viele Servos mit Arduino steuern

Jetzt erzeugen wir ein Servo: Servo myservo; Im Setup des Sketches definieren wir nun den Port: (der hier gewählte Port ist für Tests perfekt, da er mit allen Bibliotheken und Arduino Boards funktionieren sollte)Servo für den Modellbau Innenleben eines Servo: Vorgelegegetriebe, Motor und Elektronik.Um das Projekt Servomotor mit einem Potentiometer steuern durchzuführen, wird der folgende Ablauf empfohlen: Betrachte das Video (siehe Abbildung 1) und lese die Aufgabenstellung sorgfältig durch. Die Servomotoren SIMOTICS S-1FK7 sind permanentmagneterregte Synchronmotoren. Eines für die +5V, eines für die Erdung GND und eines für das PWM Signal. Servomotoren sind . Hier hilft ein Blick auf das Datenblatt. Schaltet anschließend Q1 ab und Q2 ein, wird dessen Ansteuerspannung aus C2 entnommen.Seit längerem beschäftige ich mich mit dem Raspberry Pi und der Ansteuerung von Servo Motoren.
Motoransteuerung mit PWM
Dazu sind eine Messung der Istwerte und eine Regelung zum Vergleich der .Servoantriebe dienen zur Betätigung von elektrischen Servomechanismen. Für die Ansteuerung und Regelung ist ein funktionierendes Gebersystem zentral. Energieformen um in Bewegungsenergie mit dem Ziel, als Antrieb mechanische Arbeit . Betriebsgeschwindigkeit: 0,09sek/60° (4,8 V); 0,08sek/60° (6V). Das Programm zum Ansteuern des Servos sieht demnach wie folgt aus: void setup () {. Mechanische Reparaturen (Dreharbeiten, Aufspritzen der Welle) Servomotor Reparatur 24 Stunden, 7 Tage Erreichbarkeit schnelle Fehleranalyse Reparatur aller Fabrikate Baumüller Services. Das ansteuern des Servos ist beim Arduino und ESP8266 das selbe Prinzip nur beim ESP32 gibt es eine Neuerung.Der Servomotor hat drei Anschlüsse: braun: GND. Der Servoverstärker interpretiert dieses Signal und versorgt den Servomotor mit der entsprechenden Leistung, um die Anforderung zu . Die Motoren zeichnen sich durch hohe Überlastfähigkeit, Robustheit und Kompaktheit aus. Servo-Driver sind in der Industrie weit verbreitet und machen automatisierte Produktionsmethoden erst möglich.Einfache Bewegungssteuerung. Zur Steuerung des Servomotors SG90 muss ein PWM-Signal generiert werden. Es handelt sich . Der mittlere Anschluss des Potis wird an den analogen Eingang A0 angeschlossen. An einem Beispiel möchte ich zeigen wie die PWM etwas besser eingestellt werden kann.Das Kollmorgen 2G Motion System nutzt das vereinte Leistungspotenzial unserer AKM2G Servomotoren und der perfekt abgestimmten AKD2G Antriebe, die eine einzigartige Leistungsdichte und Steuerung bieten. Für Arduino und ESP8266 wird die Funktion analogWrite() verwendet, die [.benötigte Bauteile.
- Stiftung Warentest Medikamente Zum Abnehmen
- Stiftung Naturschutz Naturbegleiter
- Sternwarte Burg Feuerstein | Wandern auf der Langen Meile in der Fränkischen Schweiz
- Steuer Pauschalbeträge 2024 – Was kann man von der Steuer absetzen? Die große Übersicht 2024
- Stiftung Oder Gemeinnütziger Verein
- Stilles Qigong Medizin : Qigong Training
- Stihl Ms 200 T Reparaturanleitung
- Steve Agee Wikipedia , Steve Agee on PEACEMAKER Cast Chemistry and ’80s Hair Bands
- Still Pille : Die Pille • Sorten, Kosten, Nebenwirkungen
- Steuerklassenwechsel München , Formular-Management-System