Nema 17 Schrittmotor Anschließen
Di: Samuel
Kostenloser Versand innerhalb . ich versuche einen Nema 17 Steppermotor (1,8° / 2,55V / 1,7A) mit einem CNC shield zum laufen zu bringen.Schrittmotor Nema 17 Motor 17H248-15-4A Schrittmotoren Treiber TMC 2209 V 2.3V, 2-Phasen, 4-Draht, 1. Die Arduino-Software kommt mit der Stepper-Library.5A 12V 4-Draht 1. $292,70 + Warenkorb + Wunschliste + Vergleich.com und das Programm ist das: /* Stepper Motor Control – one revolution This program drives a . Bestätigen Sie den Nennstrom des Motors. Der DM542 wurde für alle Arten von 2-Phasen-Hybridschrittmotoren entwickelt, die einen Außendurchmesser von 42 bis 86 mm haben und einen Phasenstrom von weniger als 4,0 A benötigen.Demnach müsste man die Referenzspannung der A4988 Treiber auf 0,016V einstellen. Die kleinere Variante A4988 hatte ich auch schon mal in einem Beitrag gezeigt. Ein shield ist das ja nicht.odt Seite 1 / 6 V1.,Ltd is located in Shenzhen. Seite 1 von 1 Zum . Der Schrittmotor arbeitet präzise, glänzt durch seine einfache Ansteuerung, ist robust und kosteneffektiv. Egal, ob du diese oder andere gekauft hast, du solltest ein Datenblatt der Motoren vorliegen haben.3 Kabel, für Kreativität CR-10 10S End 3 3D CNC Drucker Extruder und Y-AchseNEMA 14, 35×35, 0,3 Nm; NEMA 17, 42×42, 0,5 Nm ; Die Vorteile von Schrittmotoren sind, wie gesagt, ihre Präzision und der große Drehmoment.
Schnell und einfach den A4988 einstellen am 3D Drucker
Spezifikationen. Ich wollte für den Antrieb den Nema 17 (17HD40005-22B) nehmen. Hier oben habe ich noch den Anschlussplan des TB6600. Dieser elektronische Schrittmotortreiber erzeugt aus einem digitalen Takt- und einem .Ich habe mir die zwei Steuerbaugruppen TB6600 besorgt mit den Nema 17 Motoren und muss sagen, das ist eher ein Schrittmotor Treiber nach meinem Geschmack.Schrittmotor NEMA17 17HS4401S des 3D Druckers. Im Folgen-den zeigen wir Ihnen, was bei der Inbetriebnahme und der Verwendung zu beachten ist.0 Netzteil für den Motor: Labornetzteil (zum Testen) 5.
NEMA 17
Als Steppertreiber verwende ich den A4988. Bei Schrittmotoren gibt es von den Herstellern in der Regel keine offiziellen Spezifikationen, bis zu welcher Spannung ein Motor eingesetzt werden darf.Beachten Sie, dass NEMA 17-Schrittmotoren während des Betriebs dazu neigen, hohe Ströme zu verbrauchen. Zwei-Phasen-Schrittmotoren verhalten sich ähnlich wie Synchronmotoren.) oder Robotik eingesetzt werden. Guten Tag Herr Ostermann, ich hätte die Absicht 56 Schrittmotoren (Nema 8, mutmasslich zirka 0,2A) getaktet (bedingt synchronisiert) eine Aktion ausführen zu lassen: Auf das Taktsignal drehen alle Motoren eine individuelle Schrittzahl vorw-wärts und von da alle eine konstante Schrittzahl zurück.
Schrittmotoren l Informationen zu Stepper Motoren
Im „High Voltage“ Bereich wird der Schrittmotor und das Netzteil angeschlossen. Download Center. In diesem findest du die Pin-Belegung.
Verkabelung und Steuerung der MPCNC: Eine Schritt
Forum: Mikrocontroller und Digitale Elektronik Schrittmotor + Steuerplatine + Siemens Logo Sehr wichtig! Schrittmotor + Steuerplatine + Siemens Logo Sehr wichtig! Schrittmotor + Steuerplatine + Siemens Logo Sehr wichtig! Hi, ich bin neu im Forum und brauche dringend eure Hilfe.Schrittmotor ansteuern mit Arduino + TB6600 In diesem Blogbeitrag möchte ich euch zeigen wir Ihr den Stepper Driver TB6600 an den Arduino Uno anschließt und betreiben könnt.
NEMA CLOSED LOOP SCHRITTMOTOR
8 Grad, mit 39. Ein Nachteil sind die typischen, ruckartigen .
Motorsteuerung eines Schrittmotors (Stepper Motor)
Die Ausgänge des Arduino-Boards werden durch die vier Schaltstufen der H-Bridge verstärkt und an den Stepper-Motor geschickt.NEMA CLOSED-LOOP SCHRITTMOTOR NEMA-23-04CL 1.5P1-X, der deutlich stärker, schneller und zuverlässiger arbeitet, zum Einsatz. Kann mir hier jemand die Kabelbelegung verraten? Auf eine Antwort von fabber-parts wage ich nicht zu hoffen, bisher wurde. Bei dem Fullstep Mode habe ich den Motor flüssig zum laufen bekommen mit einem delay von 500 Mikrosekunden zwischen den . Dann folgt der .Ich bin gerade in einem Lehrlingsprojekt in welchem wir ein Förderband selebr bauen.Folgende Aufgabenstellung sollte (seiner Meinung nach!) bewerkstelligt werden: Modellaufbau einer Windkraftanlage, die eine Pumpe zur Bewässerung von Feldern antreibt.NEMA 17 – 23 – 34 Schrittmotoren. Seine Anwendungsgebiete sind preiswerte Stand-Alone-Geräte, sowie .
Schrittmotor testen—- mit wenig Hilfsmitteln– Wie geht das?
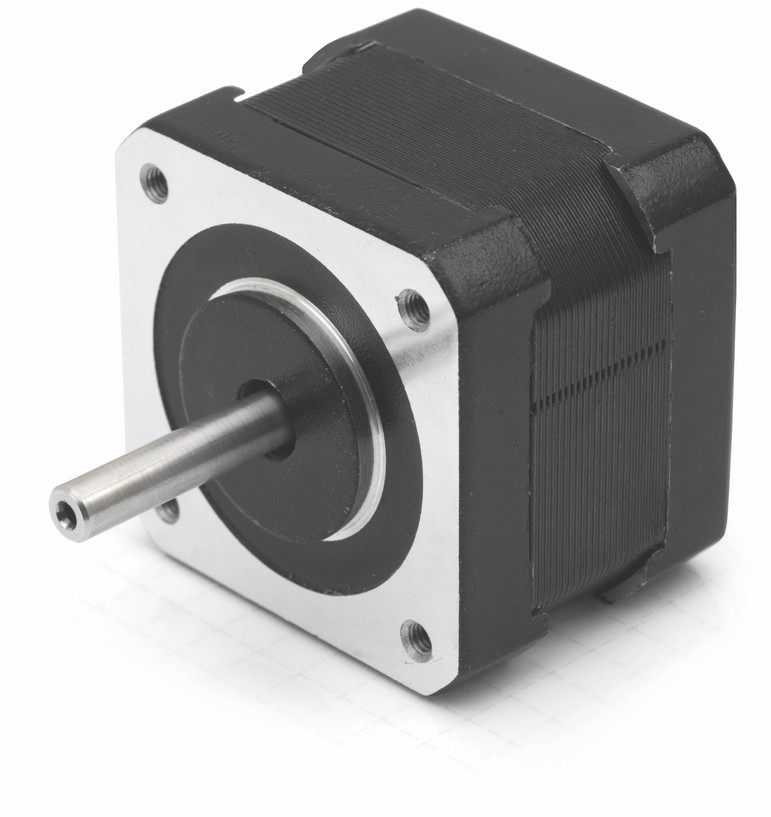
STEPPERONLINE Nema 17 Schrittmotor 13Ncm 0. Er eignet sich perfekt für eine Vielzahl an Applikationen im mittleren Lastbereich. Ich möchte mittels eins Schrittmotor (Nema 17) eine . Während des Betriebs sind die Anzapfungen der . Antworten Thema erstellen Thema: Farbcodierung bei Schrittmotoren Antworten Zitate einfügen. Der Nema17 Schrittmotor eignet sich ideal zum Antrieb der X,Y,Z Achsen und des. Sie sind einfach anzusteuern und zeichnen sich durch sehr hohe Lebensdauer und Zuverlässigkeit, bei gleichzeitig günstigem Preis aus. Shenzhen Rtelligent Technology Co. Als letztes wird GND an allen Minus Polen aufgelegt.
Anwendung und Funktionsprinzip des NEMA 17-Schrittmotors
Vref auf den Treiber habe ich auf 0,6V eingestellt.Der Nema 23 Schrittmotor 57BYGH633 wurde mit der mechanischen Komponente verbunden.Schrittmotor Nema 17 45Ncm: 1. Motortreiber Closed Loop Motor 0-8,0A, 24-48VDC für Nema 17, 23, 24 Motor – CL57T – Closed Loop Treiber – Dieser Schrittmotor-Treiber bietet eine Alternative für Anwendungen, die hohe Leistung und hohe Zuverlässigkeit erfordern, wenn der Servo die einzige.Joy-IT Motorsteuerung für Schrittmotoren.Um einen Schrittmotor zu steuern, benötigt man eine H-Bridge.Unser Schrittmotor ist ein Hybridschrittmotor vom Typ NEMA 14 (PSM35BYG104) mit 10,8V Betriebsspannung. Beide Module sind für 12V-Schrittmotoren geeignet. Jetzt tut sich bei mir folgende Frage auf und zwar wegen den Nema 17 Motoren.In Vorbereitung auf ein aufregendes Kundenprojekt, bei dem der leistungsstarke Mikrocontroller ESP32 zum Einsatz kommen soll, habe ich mich zunächst dafür entschieden, meine Erfahrungen mit dem Arduino zu vertiefen. Der Stecker welcher zum Motor geht ist 8 Polig. In diesem Beitrag zeige ich euch, wie ihr schnell und einfach die Stromstärke der A4988 einstellen könnt.in) Leitung 12,7mm(0,5) mit Sensor. Daraus erschließt sich ein weites Anwendungsspektrum. Anhand der in den Motorkennlinien verwendeten Spannungen kann jedoch auf den zulässigen Spannungsbereich geschlossen werden.
ACT Nema 17 Schrittmotor 17HS5425L20P1-X2
falsches Forum – aber es geht erstmal nur um die Kompatibilität des Treibers und des .23HS45-4204D-E1000. Ein Schrittmotor ist ein Synchronmotor oder ein Reluktanzmotor, dessen Rotor durch ein rotierendes elektromagnetisches Feld des Stators gedreht wird, wobei hohe Polpaarzahlen und kleine Leistungen typisch sind.
Schrittmotor NEMA17 17HS4401S
Auch, wenn die Schaltung recht komplex aussieht, ist das Prinzip relativ einfach.NEMA 17 (Flanschmaß 42 mm) NEMA 23 (Flanschmaß 56 mm) NEMA 34 (Flanschmaß 86 mm) Alle Stepper Motoren von igus® mit sind der jeweiligen Baugröße gekennzeichnet.Minimale Ausstattung. eines bipolaren NEMA 17-Schrittmotors ideal ist. Die Betriebsspannung liegt zwischen 18 und 50 VDC. So finden Sie immer den richtigen Motor in der richtigen Größe.Der Schrittmotor besticht durch sein hohes Drehmoment und kompakten Maße. Deine vorgeschlagene Herangehensweise ist vernünftig. Der DM542 gehört zu den 2-Phasen-Hybrid-Schrittmotor-Treibern.Der Treiber hat eine maximale Ausgangskapazität von 45 V und 2 A, was für die Ansteuerung kleiner bis mittelgroßer Schrittmotoren, wie z. Die Anschlüsse 1 und 2 haben meistens die gleichen Farben (oft braun) und die Anschlüsse 3 bis 6 sind unterschiedlich gefärbt.ACT Motor GmbH ist ein High-Tech-Unternehmen, das sich auf die Entwicklung und Herstellung von Hybrid-Schrittmotoren, bürstenlosen Gleichschrittmotoren, Servomotoren und deren Treiber spezialisiert hat.Im Folgenden finden Sie einige Tipps zur Auswahl der Stromversorgung: 1. Also verkabelung zum Treiber passt . Der M542 ist speziell auf extrem niedriges Rauschen, geringe Vibration und hohe Präzision ausgelegt. Die 14 bedeutet, dass sein Gehäuse eine Breite von 1,4 inch (ca. Nema 17 Schrittmotor-Linearantrieb mit Leitspindel 1,5A Hub 120mm 0,25Nm(35,40oz.
drylin® E Schrittmotor, Anschlussleitung, NEMA 23

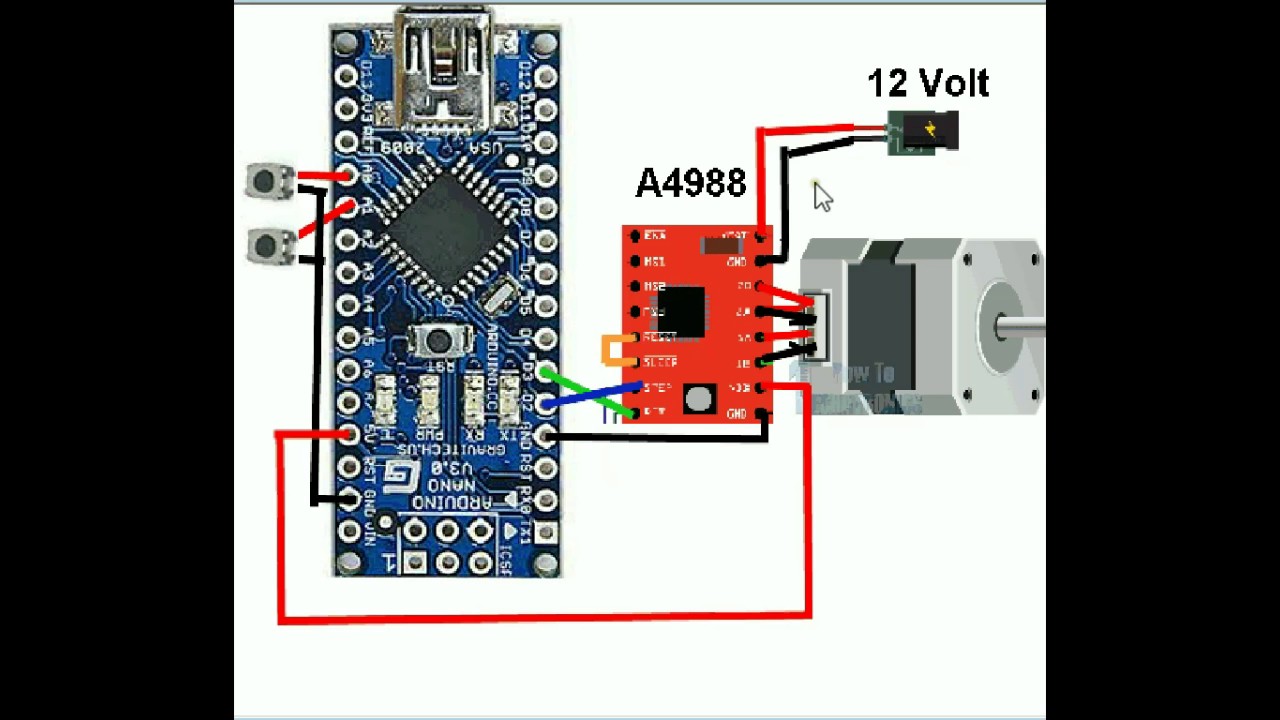
After-sale Service.ACT Nema 17 Schrittmotor 17HS5425L20P1-X2 – Jetzt online kaufen! Kostenloser Versand ab 99€ Große Auswahl Günstige Preise Perfekter Schrittmotor zum Bau von 3D-Druckern, CNC-Maschinen und Robotik-Projekten.7A 42x25mm Bipolar 1. Das ist ein Breakout board, du musst die Pins einzeln mit dem Arduino, und deiner Spannungsquelle verbinden. Dies ist eine LMD . M542 Microstepping Treiber Datenblatt SOROTEC GmbH Withig 12 77836 . Außerdem verfügt der Motor über sechs Drähte, die mit zwei geteilten Wicklungen verbunden sind.Dies ist ein Nema 17 schrittmotor-Linearaktuatoren der LMD-Serie. Daher ist es zwingend erforderlich, einen Treiber-IC wie den A4988 zu verwenden.
ACT DM542
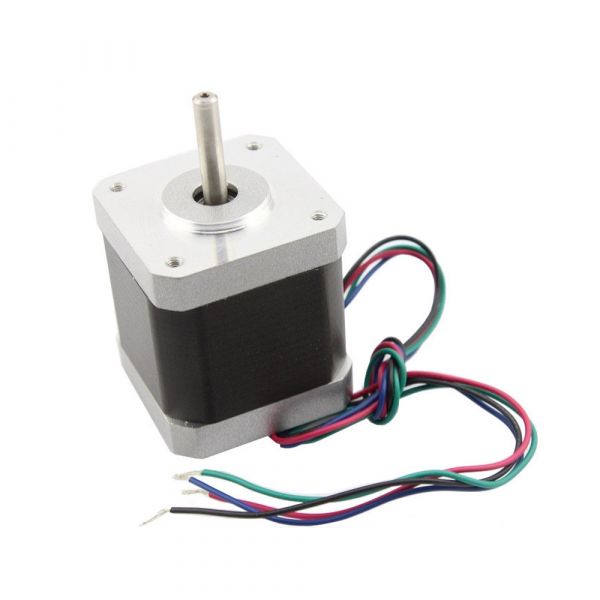
Sollten Sie während der Verwendung unerwartet auf . Bei dem Motor handelt es sich um einen Zweiphasenmotor mit vier Anschlussleitungen. Der NEMA17-01 Schrittmotor kann optimal für Aufgaben in den Bereichen Automatisierung, CNC (z. Im Gegensatz zum A4988, der ja schon sehr stressig ist. Größere Schrittmotoren sollte man allerdings mit Treibern wie dem TB6600 ansteuern.
Schrittmotor HBS57 Motor set Closed Loop Motor
Ich konnte nun in Erfahrung bringen, dass ich bei 8 Polen die Möglichkeit habe, die Motoren parallel oder seriell zu verschalten. Die LC-Anzeige kann ebenfalls entfallen, der Motor läuft auch ohne.
Schrittmotor ansteuern mit Arduino + TB6600
Die Schaltung habe ich von hier: Arduino + Stepper (L298N) | coeleveld.Dazu kommen die Schrittmotor-spezifischen Probleme. Übrigens verwendet der DRV8825 die gleichen Pins wie der . Insbesondere interessierte mich die Ansteuerung des Nema 17 Schrittmotors, und hierbei erwies sich .8deg Stepper motor 4 Drähte für 3D Drucker, CNC Fräse dummy IMETRX NEMA 17 Sätze von 5-Stufen-Motoren (42 x 34 mm) 1A-4.Hi, ich habe mir das CNC Shield V3 Mainboard gekauft.68A Nennstrom, integriert ein Planetengetriebe von 13.Drehst du die Motorwelle schneller, geht das abwechselnde Blinken in ein Leuchten über. Das Motorshield kann direkt auf den Arduino L298N Chip für Gleichstrommotoren oder 2-Phasen und 4-Phasen Schrittmotoren aufgesteckt werden. Einmal Enable (ENA) zum stromlos Schalten der Motoren, dann DIR für die Drehrichtung und STEP für die Schritte. Hast du ein Oszilloskop zur Verfügung, kannst du jede Spule an einen Kanal anschließen. einen kleinen Akkuschrauber, siehst du am Oszilloskop zwei sinusförmige Signale, die um 90 Grad phasenverschoben . Höhere Spannungen als in den Kennlinien .Guten Abend miteinander, Ich bin derzeit am Aufbau meiner Kim pro und hänge derzeit leider bei der Verkabelung / Verschaltung meiner Schrittmotoren. Bipolar bedeutet, .

Normalerweise hat eine höhere Spannung eine bessere Leistung. Hier der LD293D.Geeignet für so gut wie alle arten von Schrittmotoren bis zu maximal 5,6 Ampere, wie CNC-Maschinen, Laser-Schneider, Plotter usw. Es sind 3 8 Polige RIH 2318100300-8-B verbaut.
Stepper-Motor mit dem DRV8825 steuern
Das USB-Kabel ermöglicht es, die Hauptplatine an einen Computer, ein Notebook, eine Ladevorrichtung zum Laden des Druckräumwerkzeugs anzuschließen. Die Polschuhe sind oftmals als Kamm unterteilt (gezahnt). Der JST Stecker Weiss ist wie folgt belegt: RT | Frei. Gravierlaser, 3D-Druck, Fräse, etc. Drehst du die Motorwelle über z.de haben die dort gekauften Nema 17 Schrittmotoren andere Kabelfarben, nämlich rot, grün, gelb, blau. 1,40 € Thermomatte 220 х 220 mm des 3D . Zusätzlich sind 6 digitale I/O und 6 Analoge Eingänge mittels dreipoligen JST-Konnektor herausgeführt (Signal|VDC|GND). Im Test hat sich gezeigt, dass man die Referenzspannung der 28BYJ-48 Motoren auf 0,105V einstellen kann, ohne dass die Schrittmotoren überhitzen. Die Wahl des Treibermoduls liegt also bei Ihnen, hier . HBS57 ist ausgestattet mit 42 und 57 Serie Closed-Loop-Schrittmotoren, die für herkömmliches Schritt System-Upgrades bequem sind.Auf dem OPEN-CNC-Shield sind für jeden Treiber 4 Ausgänge.hab`dann erstmal tagelang kräftig gegoogelt und nen Schrittmotor (Stino 4-Strang Motor) als Generator bestellt sowie eine Modellbau . Die 5 Leuchtdioden mit den 1kΩ Widerständen (R1-R5) dienen erstmal nur zur Anzeige zum Testen ohne Motor. In dem Beispiel wird der Motor mit dem Treiber . Die Bewicklung des Stators ist . Wenn der Motor kontinuierlich überlastet ist, wird der Fahrer Ausgang ein Alarmsignal in der Zeit, die die gleiche wie die Zuverlässigkeit des Systems AC-Servo aufweist.Dieser Nema 17 Schrittmotor mit 48mm Baulänge und 1. Bestätigen Sie die Betriebsspannung.
Schrittmotor NEMA 17
Dieser Aktuatortyp besteht aus einem hochintegrierten kugelumlaufspindel-Linearschri.Technical Support. März 2016 um 12:30 Uhr.8°, die Stromaufnahme liegt bei 400 mA. Wird der ESP32 von einem anderen Rechner angesteuert, kann der Taster und die beiden 10kΩ Widerstände (R6,R7) entfallen. Ich würde es ähnlich angehen, insbesondere wenn es sich um ein Einzelstück handelt.Um diesen Schrittmotor mit Raspberry Pi anzutreiben, müssen Sie ein Motortreibermodul wie L293D oder L298N anschließen. Am A4988 hat mich geärgert, dass das Kühlblech am . Wenn Du nun die Schalter S1 bis S4 nacheinander betätigst und öffnest und dabei die richtige Reihenfolge einhältst, so wird sich der Motor beim Schalten jedes neuen Schalters einen Schritt weiterdrehen.Und reduzieren Maschine Energieverbrauch. Ich habe meine Nema 17 Schrittmotoren bei Stepperonline* gekauft. Die Coils hab ich so verkabelt wie vom Hersteller verschrieben und auch schon getestet mit einer Batterie. Sie finden ihn im Datenblatt des Motors. USB-Kabel zum Anschließen von ArduinoMega 2560 R3.Schrittmotor mit permanentmagnetischem Läufer. Dies ist eine LMD-Serie Nema 17 schrittmotor-Linearaktuatorenen.73: 1 Übersetzungsverhältnis ; Es ist eine gute Lösung für Anwendungen, die bei begrenztem Platzbedarf eine geringe Geschwindigkeit und / oder ein hohes Drehmoment benötigen ; Ähnliche Artikel schnell erhalten. Treiber wie im Bild verkabelt: Vm und GND zum . It is a company integrating R&D, production and sales of stepper motor drivers, servo drivers, stepper motors, servo motors and screw spindle servo stepper motors. Da der Elektrotechniker jetzt aber im Urlaub ist, wollte ich schon mal den Schrittmotor an den Treiber und meinen Raspberry PI (sorry ich weiß eig.Hallo zusammen, entgegen der Beschreibung auf der Website von fabber-parts. Anwendungsbeispiele von Schrittmotoren Gängige Anwendungen von Stepper Motoren sind all jene, die eine . Die Betriebsspannung ist der wichtigste Faktor bei der Auswahl eines Netzteils.
Schrittmotorsteuerung mit dem Arduino Nano
Kabelverlängerung an die Schrittmotoren löten Schrittmotoren: Pin-Belegung und Verbindung mit Steuerkabel dokumentieren.
Dieser Aktuatortyp besteht aus einem hochintegrierten linearen Schrittmotor und einem.Ja, Der Nema 17 läuft auf 12, 24, 36 und 48V, du musst nur den Strom vom Schrittmotor (ja, der POLOLU A4988 ist ein sehr guter) wird übrigens seit es 3d-Druck gibt, für low auf ebay gehandelt. Der Schrittwinkel beträgt 1. Der Schrittmotor wird an die . ALLGEMEINE INFORMATIONEN Sehr geehrter Kunde*in, vielen Dank, dass Sie sich für unser Produkt entschieden haben.

Beschaltung In meinem Beispiel ist es wie folgt angeschlossen:ENA – = GND . vom Typ NEMA 17 oder NEMA 23) alle gleich.In dem Beispiel kommt der ACT – Motor 16HS2404L14.8 Deg: 1: Widerstand 2,2 KOhm: 1: A4988 Schrittmotor-Treiber-Modul: Kühlkörper benutzen: 1: MB102 Breadboard Netzteil Adapter: Der Aufbau Herzstück der Steuerung ist der Baustein A4988. Grundsätzlich funktionieren aber bipolare Hybrid-Schrittmotoren (z.
- Ncbi Chromosome Map , Chromosome 17
- Nbb Netzgesellschaft Kundenservice
- Netflix Mai 2024 : Alle 89 neuen Netflix-Filme 2024: Sci-Fi-Action, Fantasy
- Netherlands Tax 2024 _ Tax Plan Caribbean Netherlands 2024 adopted after some changes
- Nejm Website : Perioperative Pembrolizumab for Early-Stage Non
- Neo Magazin Royale Letzte Ausgabe
- Nestle Produktion – Unser Zeitstrahl zur Geschichte Nestlé Deutschlands
- Nefes21 Web , Uyanış Yolculuğum
- Netto Kundenbeschwerde | Beschwerde schreiben! Sofort online versenden
- Nervenentzündung Hund Symptome
- Net Schulbuch Nrw : Sek2 Informatik NRW