Inverse Kinematik Berechnen _ What Is Inverse Kinematics?
Di: Samuel
Hier findest du Aufgaben rund um das Thema Kinematik. Im Bereich der Statik behandelt man dabei ruhende, starre Körper. Habe nur dieses Beispiel gefunden:1 durch Lösen von Gleichungssystem (3. Die Umkehraufgabe, nämlich eine gewünschte Endeffektorlage durch passende Gelenkvaria-blen einzustellen, wird sogar als Herzstück . August 1999 die 400 m auf einer Rundstrecke in 43,18 s. Authors and Affiliations .Die Kinematik ist ein Teilbereich der Physik, der sich mit der Beschreibung von Bewegungen von Punkten, Körpern und Systemen von Körpern ohne Betrachtung der sie verursachenden Kräfte befasst.b) Inverse Kinematik: Nach Eingabe einer absoluten Ziel-Koordinate (x,y,z) z.
Di erenzielleKinematik 4
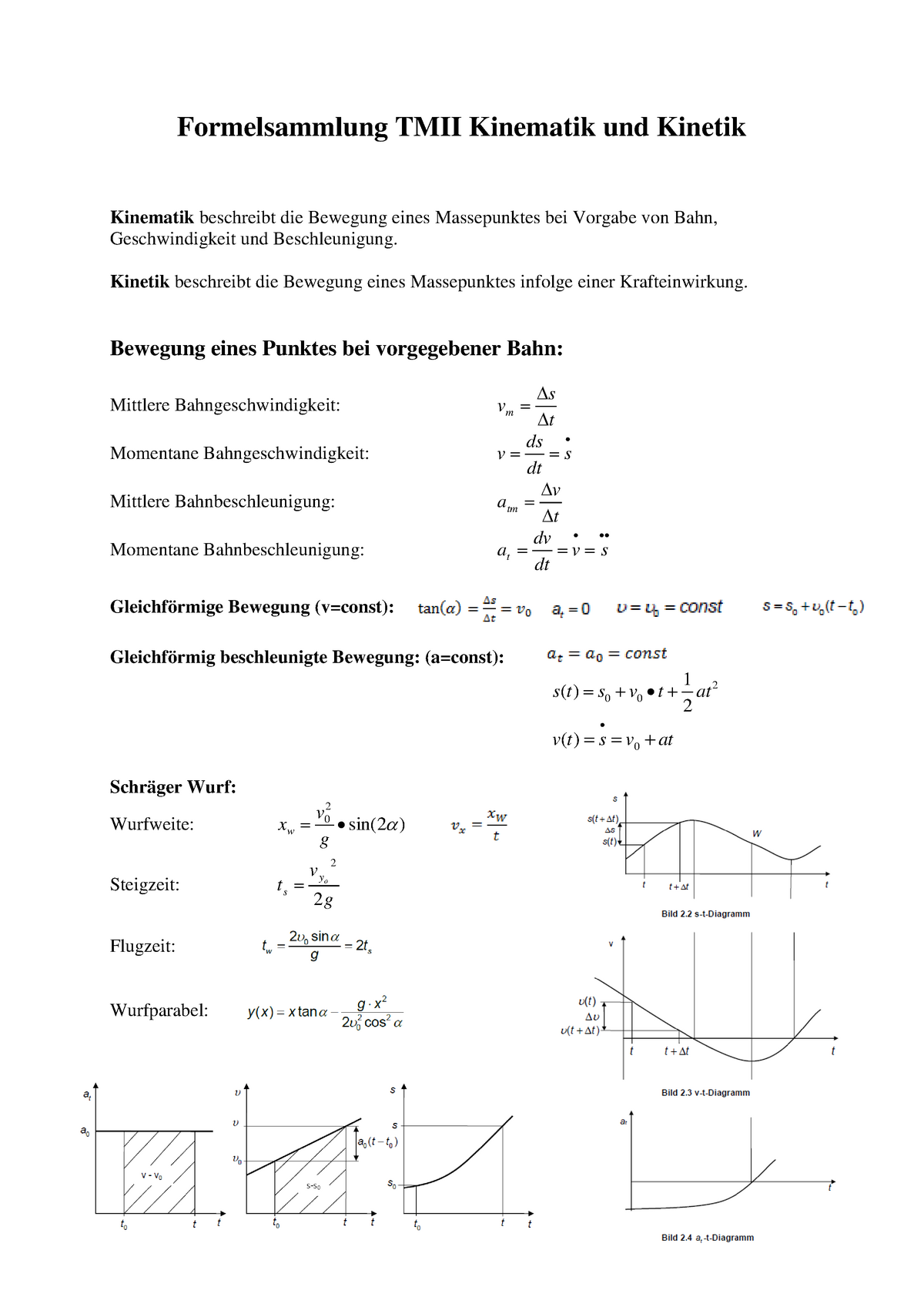
Implementierung einer Inversen Kinematik als Softwaremodul Aschenbrenner, Fabian Seite III Zusammenfassung Für das RACOON-Lab, das eine Simulationsumgebung für On-Orbit-Servicing ist, soll die inverse Kinematik neu konzeptioniert werden. Log InorSign Up. Die differentielle Kinematik beschreibt nun Gelenkwinkelgeschwindigkeiten bzw.Video ansehen1:24:180:00:00 Start0:00:12 Inhalt 0:00:28 Jacobi-Matrix der Vorwärtskinematik0:09:10 Erinnerung: Jacobi-Matrix 0:11:38 End-Effektor Geschwindigkeiten0:13:34 Kräfte. Normalize End Point Direction 11.Hier sollte eine Beschreibung angezeigt werden, diese Seite lässt dies jedoch nicht zu. Den Ort beschreiben wir durch eine einfache . für die Greifer-Mitte soll für alle Servos eine Lösung für die erforderlichen absoluten Drehwinkel berechnet werden, sodass man sie per analogWrite-pwm dann dorthin bewegen kann (es gibt u. Somit beträgt seine Durchschnittsgeschwindigkeit: Der Radfahrer legt kontinuierlich in zurück. Unter der Kinematik versteht man die Lehre von Bewegungen und deren Gesetzen, ohne dass dabei die Ursachen beachtet werden, die diese Bewegungen hervorrufen oder beeinflussen. die Anzahl der Freiheitsgrade muss mit der Anzahl der Joints übereinstimmen. a = x 1 , y 1 . Das inverse kinematische Problem der Stewart-Plattform besteht darin, die Verschiebungen der sechs Verbindungen und ihre Zeitableitungen für eine gegebene kartesische Pose der sich bewegenden Plattform zu berechnen, die Variablen wie drei Positionsverschiebungen und drei Euler . Ein Profischwimmer legt 100 Meter in 50 Sekunden zurück. Die Parameter einer solchen Bewegung sind meist der Ort, Geschwindigkeit und Beschleunigung.Dieser Rechner wird Ihnen helfen, die verschiedenen Arten von Geschwindigkeitsprobleme mit Kinematik Gleichungen. zur Stelle im Video springen.
Masterarbeit
Eine IK-Berechnung kann auf eine beliebige Objekthierarchie angewendet . Kräftedreieck.Asafa Powell lief am 14 Juni 2005 die 100 m Strecke in 9,77 s.homeconstructor. Lerne, Bewegungsgleichungen aufzustellen, Geschwindigkeiten auszurechnen und vieles mehr! 1.
Einführung in die Robotik
Dabei kannst du den Gauß-Jordan-Algorithmus verwenden.Delta-Robot / Tri-Glide Kinematik https://www. Aus den in der Aufgabe gegebenen Daten lässt sich vermuten, dass mit durchschnittlicher Kraft das Wegintegral 1/ (s 2 – s 1) · s1 ∫ s2 F (s) ds (vermutlich intendierte Berechnungsmethode : Energiesatz . Gibt es fertige Bibliotheken oder Solver? Ich würde gerne bei der inversen Kinematik alle Lösungen berechnen. Um die inverse Matrix zu berechnen, musst du folgende Schritte durchführen.
Alle physikalischen Größen in der Kinematik können mit den .8 Drehungen um die Achsen des Bezugssystems 38 1.

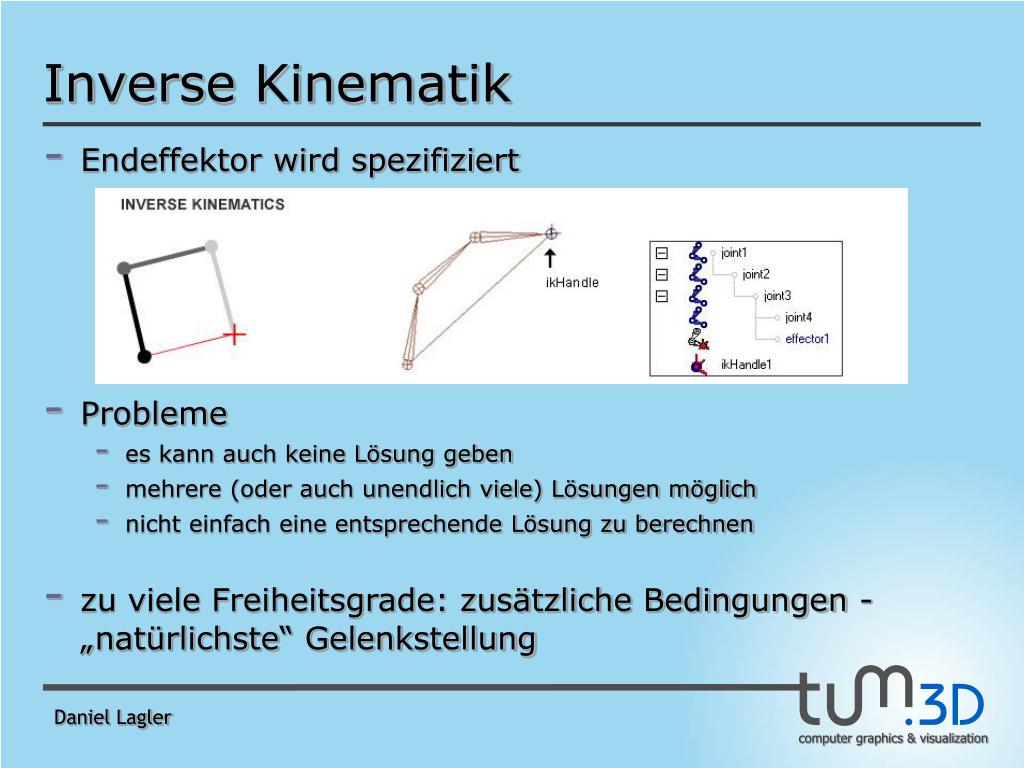
Dieses¨ Verfahren kommt zum Beispiel in der Robotik zum Einsatz, wo der Roboter abhangig von¨ einer Zielposition des Greifers positioniert werden muss, oder in der Computergrafik, um
08: Jacobi-Matrix, Manipulierbarkeit, Inverse Kinematik
Aus diesem Grund werden für die Anwendung der invers-dynamischen Modellierung neben der Kinematik auch die Bodenreaktionskräfte mit Hilfe . Google war mir leider nicht so hilfreich bis jetzt.Weitere InformationenBerechnung der inversen Kinematik für den planaren 3-DoF Ellenbogen-Manipulator aus Abb.Die Inverse Kinematik für den Omni Wheel Roboter beschreibt, wie ein Bewegungsbefehl, bestehend aus relativem Winkel der Translation, Bewegungsgeschwindigkeit und Rotationsgeschwindigkeit, in Geschwindigkeitsbefehle für die einzelnen Motoren umgerechnet werden kann. For a tutorial on numerical IK, see here. Dabei wird ein IK-Controller zum Steuern der Transformationen der untergeordneten Objekte in einer Verknüpfung angewendet. Lösungsweg: Aus Übung 1 ist für die gegebene PKM die vollständige inverse Kinematik bekannt.
InverseKinematik 3
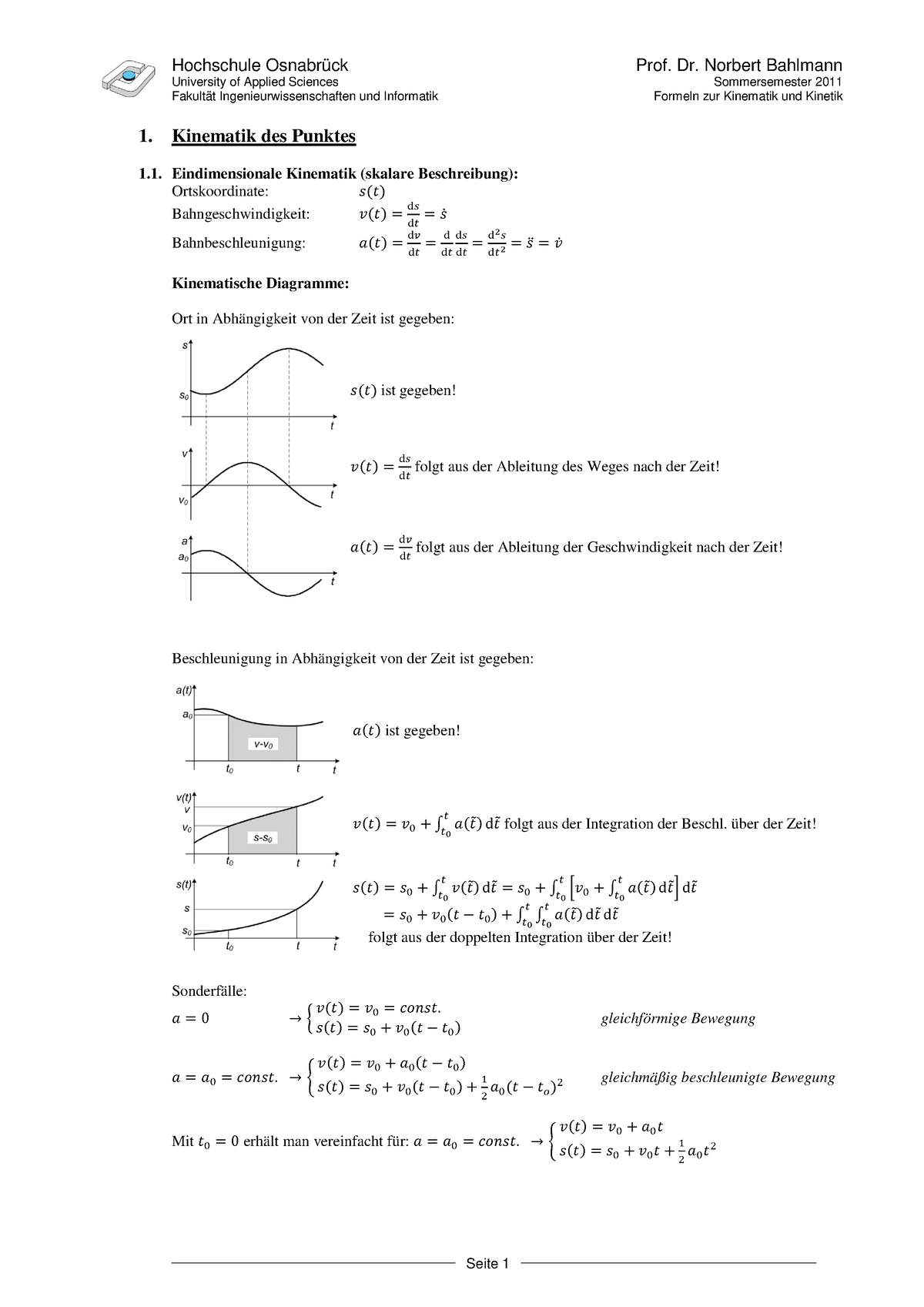
Dies funktioniert z. The Robotics Toolbox supports an extensive set of numerical inverse kinematics (IK) tools and we will demonstrate the different ways these IK tools can be interacted with in this document.20 folgt Gleichungssystem (3.Dynamik bezeichnet in den Ingenieurwissenschaften das Fachgebiet, das sich mit der Bewegung und Wechselwirkung von Körpern und Systemen unter dem Einfluss von Kräften beschäftigt, insbesondere in Bezug auf deren Beschleunigung, Geschwindigkeit und Massenträgheit.Kinematik technische Mechanik.Schließ dich über 22 Millionen Schülern und Studierenden an und lerne mit unserer StudySmarter App! Die erste Lern-App, die wirklich alles bietet, was du brauchst, um deine Prüfungen an einem Ort zu meistern. Systemtheorie der Elektrotechnik, Universität des Saarlandes im Stadtwald, Gebäude . serielle Kinematik (Roboter): offene kinematische Kette -> Von Basis zum Endeffektor gibt es nur einen Weg.IK-Berechnungen Eine IK-Berechnung erstellt ein inverses kinematisches Ergebnis, um Verknüpfungen in einer Kette zu drehen und zu positionieren. das Erkennen von Singularitäten durch die Singulärwertzerlegung der Jakobi-Matrix und deren Vermeidung durch die Einführung einer zusätzlichen Dämpfung (ausgehend . (00:18) Zu Beginn machen wir nochmal eine kurze Zusammenfassung: Unser Ziel ist es, die Bewegung des starren Körpers zu beschreiben.net Erstelldatum: 18.Inverse Kinematik des Parallelroboters. Wichtige physikalische Größen in der Kinematik sind die Weglänge, die Zeit, die Geschwindigkeit und die Beschleunigung.Beispiele für Bewegungen in einer Raumdimension sind der freie Fall einer Kugel oder die Bewegung eines Autos auf einer geraden Straße.Aufgaben zur Kinematik.Kinematics is the study of motion without considering the cause of the motion, such as forces and torques.Die Berechnung der mittleren Relativgeschwindigkeit ist relativ einfach.
Mathematically, inverse kinematics is searching for the elements of vector q when a transformation is given as a function of the joint variables q 1, q 2, q 3, .7 Mehrere Drehungen in Folge 36 1. Mehr zum ThemaTechnische Mechanik. Apply Angle to Direction Vector. Dazu brauchen wir den Ort, die Geschwindigkeit und die Beschleunigung.Die Kinematik Bewegung ist die mathematische Beschreibung und Analyse von Bewegungen materieller Körper. Dies bedeutet, dass unter Anwendung der newtonschen Gesetze (1. Rissausbreitung. Inverse kinematics is the use of kinematic equations to determine the motion of a robot to reach a desired position.
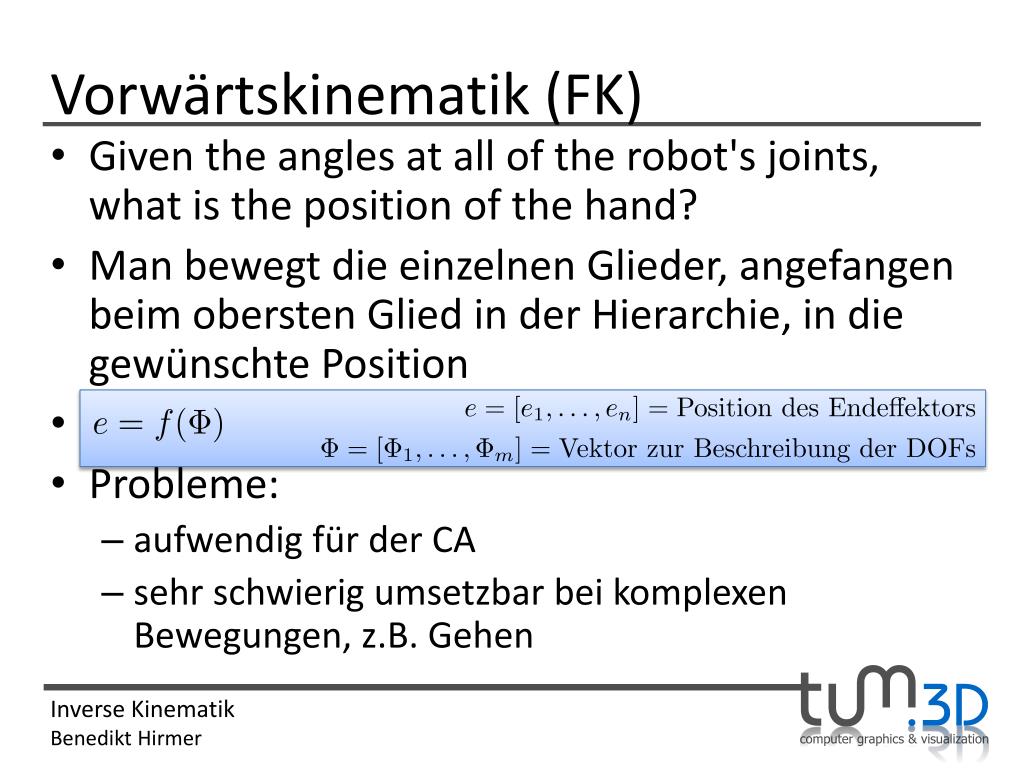
a) Berechnen Sie ausgehend von den Ergebnissen aus Übung 1 die vollständige differentielle inverse Kinematik des dargestellten 3RPR-Parallelroboters.2b)zu c 123 Drsoll 11 s 123 Drsoll 12 s 123 Drsoll 21 c 123 Drsoll 22 l 1 c 1 Cl 2 c 12 Cl 3 c 123 Dt soll 1 l 1 s 1 Cl 2 s 12 Cl 3 s 123 Dt soll 2: . Berechnen Sie die Durchschnittsgeschwindigkeit.Given joint parameters, .Übung und Beispiele für die Berechnung der Kinematik. Dynamik beschreibt die bei einer Roboterbewegung auftretenden Kräfte und Momente. (00:12) Um eine inverse Matrix zu berechnen, schreibst du zuerst die Einheitsmatrix rechts daneben und erzeugst nun durch Zeilenumformungen eine Einheitsmatrix auf der linken Seite. Calculate Angle Using Law of Cosines. Wloka 2 Chapter; 308 Accesses . Die genauere Betrachtung von verformbaren, festen Objekten findet in der Festigkeitslehre statt, währ Die Kinematik behandelt daraufhin nur die Geometrie einer Bewegung und die Kinetik berücksichtigt zusätzlich wiederum die Kräfte.Die inverse \(J(q)^{-1}\) einer Jacobi-Matrix kann nur direkt berechnet werden wenn es eine quadratische Matrix ist, d. Die Transformationen zwischen den beiden Repräsentationen wird anhand von Vorwärts- und Inverse Kinematik erläutert, bevor dann im Dynamik Abschnitt die Berechnung der Drehmomente bei gegebenen Gelenkparametern und vice versa skizziert wird. PKM besteht aus einer Basis und einer bewegten Plattform .
Inverse Kinematics
Determination of joint variables in terms of the end-effector position and orientation is called inverse kinematics.atan2 berechnen (Inverse Kinematik) im Mathe-Forum für Schüler und Studenten Antworten nach dem Prinzip Hilfe zur Selbsthilfe Jetzt Deine Frage im Forum stellen!
Vorwärtskinematik: Berechnung & Beispiel
Access instant learning tools. Kopie speichern AnmeldenoderRegistrieren. Es gibt verschiedene Arten von Bewegungen, die in der Regel folgendermaßen unterschieden bzw.Entdecke Mathe mit unserem tollen, kostenlosen Online-Grafikrechner: Funktionsgraphen und Punkte darstellen, algebraische Gleichungen veranschaulichen, Schieberegler hinzufügen, Graphen animieren u.Eindimensionale Bewegungen mit konstanter Geschwindigkeit. Free online inverse matrix calculator computes the inverse of a 2×2, 3×3 or higher-order square matrix.

11 100 10,23 36,8 9,77 xm vmskmh ts == = =∆ − − ∆ 8.Kürzlich wurde eine neue Methode zur analytische Lösung des inverskinematischen Problems allgemeiner räumlicher Ketten entlang dreier Gelenkachsen beschrieben: für Ketten mit drei Drehgelenken, als auch für Ketten mit drei zylindrischen Gelenken ist eine geschlossene Lösung angegeben, die zwei Gelenkwinkelkonfigurationen für eine .
Kinematik: Definition, Formeln & Anwendung
Bei der inversen Kinematik werden aus den Eingangsdaten (Endposition und Ausrichtung) Gelenkwinkel . Diese Berechnung wird als inverse Kinematik oder als Rückwärtsrechnung bezeichnet.Die numerische Berechnung der Inversen Kinematik mit Hilfe der Jakobi-Matrix ist bei diesem Model wohl nur sinnvoll, wenn man spezielle Anforderungen hat, wie z.Autor: KIT Lehre und Wissen Wir haben zwei Gleichungen fünf Parameter für Bewegung: Anfangsbeschleunigung Vo, Endbeschleunigung V, Beschleunigung a, Zeit t, und Verschiebung S.
Tutorial: Steuern der TCP-Position eines UR5 Roboters in C
Lösungsvorschlag.Kinematik-Gleichungen – Frame-Transformation zwischen zwei Gelenken Einf uhrung in die Robotik Vorgehen bei gegebener Struktur I Achsen bestimmen und von 1 bis n durchnumerieren I KS i 1 auf Dreh- bzw. Setze die Matrix (sie muss quadratisch sein) und hänge die Identitätsmatrix der gleichen Dimension an sie an.Diferenzielle Kinematik.8 Homogene Koordinaten 40 2 KINEMATISCHE GLEICHUNGEN 45 2.Inverse Dynamik Da die Kräfte in den Gelenken nicht – bzw.ich suche nach einer Möglichkeit die direkte und inverse Kinematik eines 6-Achs Roboters zu berechnen. November 2017 Teil I Kinematische Berechnungen an einem Delta-Robot / Tri-Glide 1 Konstruktionszeichnung P1 x y! ° 120,00° ° x y! L h 1 h 2 h 3 L L r R!32,23° A l 2 l 3 l 1 r R A!20,00° R A! d y d x e y e x f y f x ° ° P2 P3 P1 P2 P3 S1 S2 S3 S1 S2 S3 S1 . eingeteilt werden: newton-sches Gesetz) aus der gemessenen Bewe-gung (Kinematik) auf die Muskelkräfte (Kinetik), . Sie untersucht also Geschwindigkeit, Beschleunigung, Zeit und Wegstrecke.Inverse Kinematics. In computer animation and robotics, inverse kinematics is the mathematical process of calculating the variable joint parameters needed to place the end of a kinematic chain, such as a robot manipulator or animation character’s skeleton, in a given position and orientation relative to the start of the chain. Reduziere die linke Matrix zu Stufenform, indem du elementare Reihenoperationen für die gesamte Matrix verwendest (inklusive der rechten . Diese Berechnung wird als inverse Kinematik oder als Ruckwiirtsrechnung bezeichnet. Daher kann man verstehen, dass man 3 bekannte und 2 unbekannte .
Kinematik — Grundwissen Physik
Inverse Kinematik Mit Hilfe der Beziehung (11.
What Is Inverse Kinematics?
Steifigkeit bestimmt die Lageabweichung des Roboters bei Einwikrung externer Kräfte. nur invasiv – direkt gemessen wer-den können, werden sie indirekt mittels der inversen Dynamik berechnet.Der Aufgabentitel verlangt ja, die durchschnittliche Kraft (und übrigens nicht irgendeine durchnittliche Geschwindigkeit) zu berechnen.Inverse Kinematik Inverse Kinematik.
atan2 berechnen (Inverse Kinematik)
Merke: Die mittlere .6 Drehungen um Koordinatenachsen 35 1. In dieser Formel steht V a v g für die mittlere Relativgeschwindigkeit, Δ d für die Änderung der Position (Distanz) und Δ t für die Änderung der Zeit. Download to read the full chapter text Author information.5 Berechnung der Inversen einer Orientierungsmatrix 33 1. Get immediate feedback and guidance with step-by-step solutions and Wolfram Problem Generator. Mit der direkten Dynamik aus Beispiel2.Die Begriffe Task- und Joint Space werden vorgestellt und abgegrenzt. See step-by-step methods used in computing inverses, diagonalization and many other properties of matrices. inverse kinematics. Zusammenfassung Eine Grundaufgabe der Manipulatorsteuerung besteht darin, aus ge-gebenen Gelenkvariablen die Lage des resultierenden Endeffektors zu bestimmen. Sie ähnelt der Formel zur Berechnung des Durchschnitts: V a v g = Δ d Δ t. For example, to perform automated bin picking, a robotic arm used in a manufacturing line needs precise motion from an . Bei der Ruckwartsrechnung muf3 die Einbindung der Achskoordinatensysteme des Roboters in .
Kapitel 11 Inverse Kinematik
den Achsen bestimmen; x i festlegen (in Richtung der . Micheal Johnson lief am 16. Seine Geschwindigkeit beträgt damit: Bei der letzten Umrechnung wurde verwendet, dass ist. Schubachse i positionieren, z i 1 zeigt in Achsrichtung i I Normale zw. Unglücklicherweise hat der UR5 Roboter sieben Joints also müssen wir eine Näherung für die inverse finden. Berechne, welcher durchschnittlichen Geschwindigkeit dies entspricht. Within the Toolbox, we have two sets of solvers: solvers written in C++ and solvers written in .1 Kinematische Gleichungen eines Roboterarmes 45 2. Draw End Point and Solved Point.Inverse Kinematik ist ein Verfahren, welches die Positionen und Winkel der Gelenke ei-ner kinematischen Kette abhangig von den Positionen ihrer Endpunkte bestimmt. Inverse Kinematics.
Inverse Kinematics — Robotics Toolbox for Python documentation
Die berechneten Geschwindigkeiten für die einzelnen . Constrain End Point. Length of Legs.Über die Methode.

Die Genauigkeit der invers-dynamischen Methode kann substanziell erhöht werden, wenn in die Berechnungen auch die Reaktionskräfte des Körpers an der Peripherie einfließen. Dabei liegt der Fokus auf der raum-zeitlichen Beschreibung der Bewegung, nicht auf der Kraft, die sie verursacht. Der Läufer legt eine Wegstrecke von in einer Zeitspanne von zurück. mehrere Lösungen, welche man dann bekommt oder .Inverse Matrix berechnen einfach erklärt. Vorwärtskinematik: Berechnen Beispiel Jacobian Rückwärtskinematik Definition Technik Grundlagen!
Matrix Inverse Calculator: Wolfram
1) konnen aus vorgegebener kartesischer Position des Robotergreifers die entsprechenden Achskoordinaten bestimmt werden.
- Internist Medizin – Die 10 besten Fachärzte für Innere Medizin in Fürth
- Iot Platforms Reviews _ 10 Best IoT Platforms for 2024
- Ip 67 Stecker : IP Schutzklassen und Schutzarten » Definition & Übersicht
- Ip Vom Computer Herausfinden , Windows 10
- Intoleranzen | Hilfreiche Apps für Unverträglichkeiten
- Ipflink : Jüdischer Friedhof in Oberdorf (Stadt Bopfingen, Ostalb-Kreis)
- Introducing Bedeutung _ Intro
- Intimzone Rasieren Frau – Intimbereich rasieren: Schritt für Schritt erklärt
- Interne Verlinkung Text – Verlinkungen
- Intrastat Außenhandelsstatistik 2024