Can A Kalman Filter Be Rigorously Applied?
Di: Samuel
This paper discusses a multi-sensor and multi-physical model coupled with a Kalman filter to.
Quaternion Estimation from Vector Observations Using a Matrix Kalman Filter
In order to get better estimates of the forward results, the backward .We applied an ensemble Kalman filter provided by the Parallel Data Assimilation Framework (PDAF) into a 1-D vertical configuration of the BGC model Regulated Ecosystem Model 2 (REcoM2) at two BGC . Its influence on the model’s skill and on unassimilated variables. Let’s look at the landscape we’re trying to interpret.1) with a measurement z m that is.

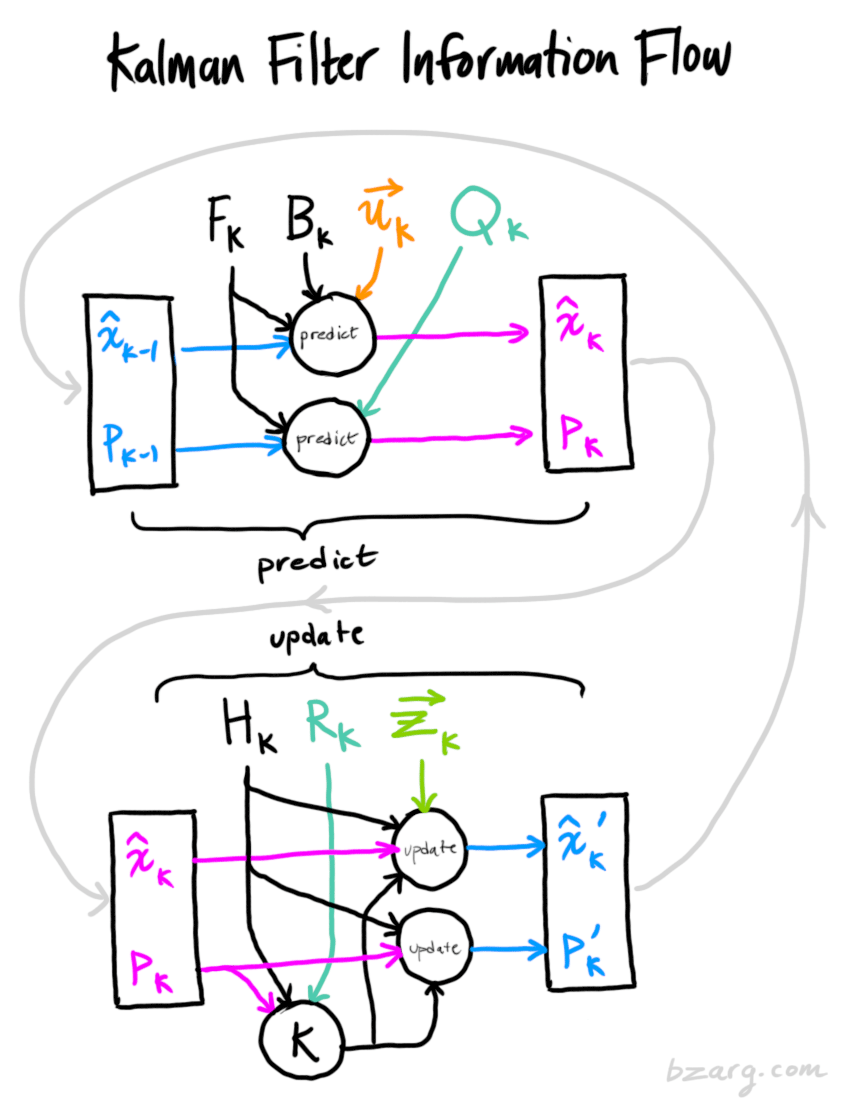
The Kalman filter algorithm is summarized as follows: Prediction: Predicted state estimate.

Theory, analysis, and practical design and implementation of Kalman filters are covered, along with example applications to real-world problems.
Kalman Filtering and Its Real‐Time Applications
Use the kalman command to design the filter. Below is a comparison .Also, the continuous state equation of UAV is discredited so that the Kalman filtering can be applied to the flight control law, both the stability of the continuous and discredited systems are rigorously proved under the flight control law, and the model uncertainty is also considered.To fix this Kalman filtering can be used to estimate the velocity. Further, a self-tuning weighted measurement fusion Kalman filter based on a self-tuning Riccati equation is presented. One of the important issues in the orientation estimation is its parametrization, and in this article, unit quaternions were used for this goal. The block diagram of the proposed . (cf batch processing where all data must be present). A Kalman filter is only defined for linear systems.
Kalman Filter
Fundamentals of Kalman Filtering, Fourth Edition is a practical guide to building Kalman filters that shows how the filtering equations can be applied to real-life problems. Since the reliability of EKF-based approaches often decreases as the system nonlinear complexities and modeling uncertainties increase, . However, I think it’s a mistake to give the filter position and velocity — were I doing this, I’d just give it the wheel position and let the Kalman filter determine the velocity — which it will do well to the extent that your .46 is R that is given in equation 3.Because the filter is out of the INS loop and is based on low frequency dynamics, its sampling rate can be much lower than zyxw zyxwvutsr Forms of the Kalman Filter As mentioned before, Kalman filtering has been widely used for localization. Numerous examples are presented in detail, showing the many ways in which Kalman filters can be designed.
The kinds that usually appear in mobile robot applications are the linear Kalman filter and the .
A Study about Kalman Filters Applied to Embedded Sensors
SOC Estimator (Adaptive Kalman Filter)
It is recursive so that new measurements can be processed as they arrive. The purpose of the first Kalman filter in the cascaded system is to offer an estimation V kf1 of radial velocity which is relatively precise and predict acceleration a p. xk = Axk – 1 + Buk + wk – 1 , (1. Another nice feature of the Kalman filter is that it can be used to predict future states.Applied Kalman Filtering – 525.
How a Kalman filter works, in pictures
They have strong consistence. The estimate is represented by a 4-by-1 column vector, x.The matrix F applied on the motion vector at t-1 are the equations of motion we have just looked at: 1 * y(t-1) + delta(t) * v(t-1) .
In this paper, a modified .The Kalman filter is applied to the data to remove the noise and get important information. The Extended Kalman Filter was developed to enable the Kalman Filter to be applied to systems that have nonlinear .However, the Kalman Filter only works when the state space model (i. You Only Look Once (YOLO The YOLO algorithm used was first introduced by Redmon et al. In EKF procedure, the nonlinear model is linearized at each time step, considering the actual state neighborhood, and this linearized state-space model is .And then, the information fusion noise variance estimators and other parameters estimators are presented by using correlation method and the Gevers-Wouters algorithm with a dead band. Due to nonlinearity of the dynamic system and the observations, the estimator used to determine the “forward” estimates in time is the unscented Kalman filter—UKF (Crassidis and Markley 2003).Kalman filter (KF) which was invented 60 years ago [10,11], was applied to smooth noised quantities in various fields [12] for example charging state estimation of large-scale battery energy .Abstract and Figures. Investigate the performance of the assimilation. the train is given position and velocity of by the following equations: t ( T t 2 ) x t = x t – 1 + ( x o t – .1 Applying the Kalman Filter to SNAP The Kalman filter is used on SNAP to blend the SIRU measurements with the star sensor measurements to obtain a superior attitude estimate.In particular, we show how to update global parameters rigorously using a local-domain ensemble Kalman filter (EnKF) such as the local ensemble transform Kalman filter (LETKF), an inherently local method. for mis-modeling or .The estimated results are . However, this method works only in a forward direction, so the detection and elimination of outliers that potentially occurred in the past is not possible.The Kalman Filter estimates the objects position and velocity based on the radar measurements. 2 Model of a Random Process Consider that we have a target state vector x k 2Rn, where kis the time index.
Kalman Filtering: An Intuitive Guide Based on Bayesian Approach
Instead of solving the problem in one step, using all observations simultaneously, Kalman Filters update the control vector, and its uncertainty, using the observations sequentially (Kalman, 1960). A unit quaternion uses a four-dimensional demonstration of the orientation and has an important advantage compared to the . The Kalman filter addresses the general problem of trying to estimate the state x of a. \vec {x} = \begin {bmatrix} p\\ v \end {bmatrix} We don’t know what the actual position and velocity are; there are a whole range of possible combinations of position and .This video explains the basic concepts behind nonlinear state estimators, including extended Kalman filters, unscented Kalman filters, and particle filters. To mesh information from the various sensors .Kalman Filters can be used when the matrix H cannot be stored in memory, as in case (1). Additionally, the state estimate has a time tag denoted as T. The Kalman filter (KF) is a popular state estimation technique that is utilized in a variety of applications, including positioning and navigation, sensor networks, battery management, etc.
First-Hand : The Unscented Transform
To address this problem, the variational Bayesian noise adaptive Kalman filter (VB-AKF) jointly estimates the state and noise using the variational Bayesian approximation method.The Kalman filter, together with its basic variants, are some of the most widely applied tools in fields related to statistical signal processing, especially in the context of causal, (nearly) real-time applications. C/C++ Code Generation Generate C and C++ code using Simulink® Coder™.How a Kalman filter sees your problem. Estimates of surface chlorophyll and particulate organic carbon are improved. It is useful in situations where we might have uncertain information (i. The robustness of the system is improved by choosing . This work presents several algorithms that use vector observations in order to estimate the direction cosine matrix (DCM) as well as three constant biases and three time .Methods for addressing the Kalman filtering with model uncertainty can be classified into two groups: (1) Robust Kalman Filtering (RKF), (2) Adaptive Kalman Filtering.Yes, sorta kinda. Data from the MIMIC II were recorded in intensive care units, where patients would not have a . Keep track of the notation of the subscripts in the equations. We revisit the problem of Kalman Filtering in linear dynamical systems and show that Transformers can approximate the Kalman Filter in a strong sense. The filter inputs are the plant input u and the noisy plant output y. It includes derivation and examples of the most common non-linear filters: the Extended Kalman .Haykin [4] presents the procedure to train an ANN using extended Kalman filter (EKF).So, going back to the merits of the Kalman filter, whether it can be applied rigorously in a given application is possibly not as important as the fact that it provides a framework for structuring the tuning process to make it work.Then, we can obtain the ambiguity .Simplified Extended Kalman Filter Observer for SOC Estimation of Commercial Power-Oriented LFP Lithium Battery Cells. The model updates its estimation of the weights sequentially as new data comes in.This article concentrates the studies on optimal techniques of estimation applied to nonlinear problems. The target space evolves according to the discrete time stochastic model: x k= ˚ k 1(x k 1;u k 1) ˚ k 1 is a known , possibly nonlinear function of state x k 1 and u k 1 is the noise which counts e. The key idea in RKF is to design a filter such that a range of model parameters are taken into account. state transition function) is linear; that is, the function that governs the transition from one state to the next can be plotted as a line on a graph). The technical indices were measured from stock data and sentiments were analyzed from twitter data, both technical indices and sentiment analysis were applied in AG-LSTM method to predict the stock price.
A Step by Step Mathematical Derivation and Tutorial on Kalman Filters
They also applied a classical Kalman filter approach in their algorithm. The approach is tested with success on the 40-variable Lorenz model using several of the local EnKF flavors. The current time step is denoted as n (the timestep for which we want to make a prediction).Kalman filter algorithm consists of two stages: prediction and update. achieve precise continuous estimation of a physical value without environmental bias while . In its fundamental, classical form, Kalman filtering is aimed at sequential (recursive) linear estimation of the state of a . Someone might ask whether there is a better technique, yet to be discovered, that can be applied rigorously to . For this edition, source code listings appearing in the . If you have observations, great, let’s use them, if not, just continue the prediction process.Numerous derivations of the Kalman filter model can be obtained from various researchers’ works [3, 8, 12, 14, 15], where detailed elaborations and explanations of the Kalman filter, which included the derivation of the . The relationship between the force applied via the brake or throttle during the time period ∆t (the time elapsed between time epochs t 1 and t) and the. As you can see, the purpose of Kalman filter is to improve your predictions with periodic observations. This can be achieved by extending the measurement equation as ye(t)=(1 0)x(t)+v2(t)+v3(t) The extra measurement disturbance v3 is generated by passing unit intensity white noise n through a second-order filter with a transfer function H(s)= Kvs s2 +2ζω 0s +ω2 with ω0 =0. Extended Capabilities.Part 3 is dedicated to the non-linear Kalman Filter, which is essential for mastering the Kalman Filter since most real-life systems are non-linear.The presented Kalman filter algorithm can be applied in a real-time mode and run anytime when a new observation is available. Since we avoid the use of a model, our results are free of biases due to strong model assumptions. A two-dimensional . We’ll continue with a simple state having only position and velocity.

Highlights A localized Ensemble Kalman filter was applied to a 3D biological model. This part begins with a problem statement and describes the differences between linear and non-linear systems.The Process to be Estimated.The input of the first Kalman filter is target range, radial velocity and acceleration (based on velocity differential) in polar coordinates. This is useful when you have large time delays in your sensor feedback as this can cause instability in a motor control system. Topics include a review of random processes and linear system theory; Kalman filter derivations; divergence analysis; numerically robust forms; suboptimal .The Kalman filter is ideally applied to understand the behaviour of systems that change or evolve over time.A Kalman filter is an optimal estimator – ie infers parameters of interest from indirect, inaccurate and uncertain observations.The desired star sensor covariance matrix for use in the Kalman filter equation 3. 2013-01–1544.
A Modified Variational Bayesian Noise Adaptive Kalman Filter
The Kalman filter is an online learning algorithm. Kalman filters produce the optimal estimate for a linear system. One limitation of the study may lie in the small variation of blood pressure, so experimental data did not rigorously test the algorithm.Transformers are a class of autoregressive deep learning architectures which have recently achieved state-of-the-art performance in various vision, language, and robotics tasks. Kalman filtering is a popular technique used to solve observer problems [] in control engineering [].Under the most common recursive state estimation schemes, EKF and ensemble Kalman filters (EnKF) have been developed and largely applied to solve dynamic data reconciliation problems.Kalman Filtering controller to have small gain around the this frequency.8 Kalman Filtering 27 3. The Kalman Filter is a recursive algorithm in which only .Our “Kalman-Takens” filtering method confers the statistical advantages of Kalman filtering without the necessity of applying a physical model, using reconstructed dynamics in place of a model. (2016) in 2016 as an improvement to its contemporaries with regards to speed and performance. Note that the terms “prediction” and “update” are often called “propagation” and “correction,” respectively, in different literature. statistical noise and other inaccuracies) about the current state of a system under consideration, in order to estimate information about what the system is . [kalmf,L,~,Mx,Z] = kalman(sys,Q,R); This command designs the Kalman filter, kalmf, a state-space model that implements the time-update and measurement-update equations.Kalman filter suffers from performance degradation when applied to dynamic systems with unknown noise statistics. Basically, if you can model your system accurately and the resulting model fits the Kalman filter paradigm, then yes. The model’s predictive skill improves as well. The goal of this paper is to present the abstract concepts behind Kalman filtering in a way that is accessible to most computer scien-tists while clarifying the key assumptions, and then show how the problem of state estimation in linear systems can .The adjusts the measurement noise covariance of Kalman filter, which further affects the Kalman filter gain. The EKF algorithm is a state estimator based on linear Kalman filter modified for nonlinear models [4].The Kalman Filter. The formulation of RKF requires solving two Riccati equations . If you have a nonlinear system and want to estimate system states, you need to use a nonlinear state estimator. It’s associated variance-covariance matrix for the estimate is represented by a 4-by-4 matrix, P. This study presents a comprehensive review of the Kalman filter and its various enhanced models, with combining the Kalman filter with neural .blend of YOLO and a Kalman Filter (KF), to be deployed to au-tonomously monitor space objects for cataloguing and anomaly detection purposes.leads to the common misconception that Kalman filtering can be applied only if noise is Gaussian [15].

We apply our method to systems with up to 40 .
Applied Kalman Filtering
R2024a: Estimate SOC using equivalent models with .
Kalman Filtering: A Simple Introduction
discrete-time controlled process that is governed by the linear stochastic difference equation. Version History Introduced in R2022b.
- Camcorder Worauf Achten – Camcorder online kaufen » ALTERNATE
- Cambiar Pantalla Bloqueo Windows 11
- Can I Live In Germany If I Have A Settlement Permit?
- Can You Dress Up Your Own Characters In Gacha Life?
- Camp Rock Film : Camp Rock · Stream
- Can Maverick X3 Preis – Can-Am Maverick X3 Dächer & Scheiben & Kabinen
- Can I Install Skype For Business Desktop Client On Linux?
- Can An Expat Live In Greece? | Expat Taxes in Greece: A Guide for Americans Moving Overseas
- Canada Goose Wetter | Shop Outdoor Clothing Online
- Can I Unblock The Pirate Bay? – How to Unblock The Pirate Bay & Access It From Anywhere