Can A Complementary Lter Be Used For Inertial Measurement?
Di: Samuel
Although many approaches have been adopted for filtering gyroscope data with inertial measurements, the most commonly used techniques are Extended Kalman filtering (EKF) and complementary filters. The effectiveness of our approach is demonstrated with simulation results.spatiotemporal measures using IMC. The inertia of an object is the propensity to remain at rest or if in motion, stays in motion at a steady speed. Accelerometers suffer from errors .

Review Paper: Inertial Measurement
FEJ2 is shown to out-perform existing methods and is able to robustly handle poor first estimates and high measurement noises. To obtain higher per-formance, the more competent Kalman ˜lter [2, 6, 8–11] is often used instead.
Inertial measurement unit
This paper presents a wearable inertial measurement system and its associated spatiotemporal gait analysis algorithm to obtain quantitative measurements and explore clinical indicators from the spatiotemporal gait patterns for patients with stroke or Parkinson’s disease. 1 INTRODUCTION Interest in inertial measurement began to accelerate in the fties alongside the U. The algorithm .

In addition, quaternion-based and gradient de- This paper aimed to provide an overview of current IMU-based Mocap system designs in the field of rehabilitation, explore the specific applications and implementation of these systems, and . Over time, the gyro drifts and becomes o by 0. In this respect, sensor fusion is used to limit the drift . It is used to analyse the movement .Heterogeneous Data Fusion Algorithm for Pedestrian Navigation via Foot-Mounted Inertial Measurement Unit and Complementary Filter Abstract: This paper proposes a foot-mounted zero velocity update (ZVU) aided inertial measurement unit (IMU) filtering algorithm for pedestrian tracking in indoor environment.Abstract: This paper considers the question of using a nonlinear complementary filter for attitude estimation of fixed-wing unmanned aerial vehicle (UAV) given only measurements from a low-cost inertial measurement unit.
An adaptive complementary filter for inertial sensor
Heterogeneous Data Fusion Algorithm for Pedestrian Navigation via Foot-Mounted Inertial Measurement Unit and Complementary Filter Design. Like other methods, it takes into account the model . The FTECF is applicable to inertial and magnetic sensors, which include tri-axis gyroscopes, tri-axis accelerometers, and tri .In Reference [20], a complementary filtering algorithm based on FADS measurement results and modified by inertial navigation system is designed to calculate the angle of attack and sideslip angle, and the effectiveness of the algorithm is proved by simulation. It has an embedded 3-axis accelerometer and a 3-axis gyroscope.
A Robust and Adaptive Complementary Kalman Filter Based
However, the results obtained from the MPU 6050 sensor is not perfectly accurate as there is noise during the measurement. It is expected that the inertial location’s accuracy could be improved by 95% that will . MPU6050 is one of the low-cost motion tracking sensors that contain a 3-axis gyroscope and 3-axis accelerometer orientation measurement. International Journal of Sports .Magnetic and inertial measurement units are an emerging technology to obtain 3D orientation of body segments in human movement analysis.In recent years, the use of inertial measurement unit (IMU)-based motion capture (Mocap) systems in rehabilitation has grown significantly. Some IMUs also include a magnetome-ter, which is commonly used as a heading . The wearable system is composed of a microcontroller, a triaxial .A visual-inertial estimator which leverages FEJ2 is presented and verified in both Monte-Carlo simulations and real-world experiments against existing state-of-the-art consistent VINS estimators. The algorithm outputs are the foot kinematic parameters that include foot orientation, position, velocity, acceleration, and gait phase.3 Kalman Filter The Kalman lter is a widely used state estimator. Studies can be improved with larger sample sizes and agreement on the metrics used and .

Keywords: Orientation estimation, inertial sensors, complementary lter, multiplicative extended arXiv:1910. The inertial sensors are used to . Hence, for motion frequencies higher than k1 and k2, the angular rate measurements are the primary source of attitude information, while for frequencies lower than k1 and k2, the respective . Reference [21] proposes to use the angle of attack calculated by INS to correctInertial can be defined as disinclination to motion, action, or change. In this article, we present the design, implementation, and evaluation of a wearable sensor glove. An Extended Kalman Filter (EKF) is the most common form of the complementary estimation, however, other estimation methods (such as particle filters and factor graphs) have been applied as well.Inertial measurement units (IMUs) are used for inertial motion tracking (IMT) in a growing number of applications as sensor fusion methods are being advanced in three directions: Magnetometer-free .
The Inertialist: Complementary Sensor Fusion
Inertial measurement units consist of an accelerometer and gyroscope to measure linear acceleration and angular rate, respectively.
A Time-Efficient Complementary Kalman Gain Filter
When the magnetometer is included, IMUs are referred to as IMMUs.Block schematic of complementary lter used by students is shown in Fig.Inertial measurement units (IMU) can be used to detect change of direction (COD) movements and COD heading angles with acceptable validity, but IMU measured or derived kinetic or kinematic variables present inconsistency and over-estimation. IEEE Transactions on Instrumentation and Measurement, 2015, 64 (1), pp.Request PDF | On Jun 1, 2019, Lin Meng and others published Effect of walking variations on complementary filter based inertial data fusion for ankle angle measurement | Find, read and cite all .The application of a two-stage complementary filter can be briefly described as follows (see also Figure 2), .brings in an associated computational load. In addition to accelerometers and gyro-scopes, MARG sensors include a magnetometer to measure magnetic field strength [41]. One can output useful information containing high-frequency noises .
An integrated INS/GNSS system with an attention-based
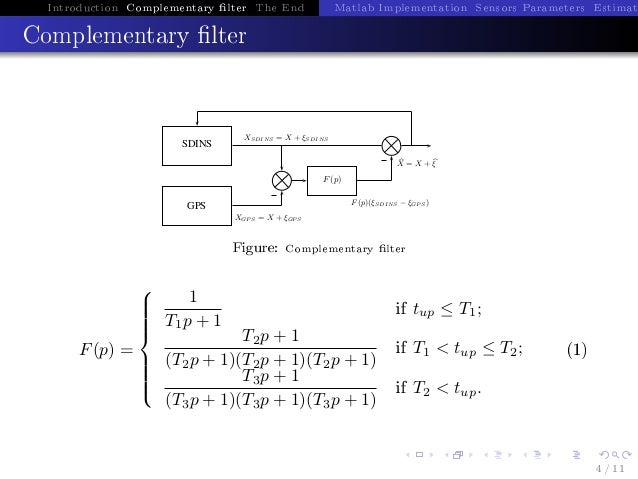
The algorithm uses differences between aiding measurements and their INS-based predictions as inputs to the complementary estimator.technologies that can be used to solve this problem include ultrasonic or microwave positioning, visual sensing, magnetic and inertial measuring and so on. Generally, the easy-to-use complementary ˜lter can perform the task of a sensor fusion, but is limited in performance [6, 7].This paper presents a wearable inertial measurement system and its associated spatiotemporal gait analysis algorithm to obtain quantitative measurements and explore clinical indicators from the spatiotemporal gait patterns for patients with stroke or Parkinson’s disease. A C q^= B Cq^ A B (3) For two quaternions, a and b, the quaternion product can be determined using the Hamilton rule and de ned as equation (4).
Sensors
This research investigates pose estimation using micro-electro-mechanical-system (MEMS)-based inertial measurement unit (IMU) in real time.sors are used to measure 3D orientation together. A survey of other nonlinear attitude estimation methods can be found in . The foot motion filtering algorithm . missile program.

The neural network provides the needed GNSS measure-ments. The resulting GNSS and INS measurements are integrated through the ltering block, consisting of an EKF and a complementary lter (Gui et al.The sensor will detect and collects the inertial measurement of an emergency responder and transmit the data wirelessly by using ESP8266 NodeMCU.Complementary ltering is a way of approaching the problem of fusing measurements/estimates with di erent noise characteristics.3 ra-dians over the course of 5 seconds.Using strapdown inertial measurements and vector observations, the proposed complementary filter provides attitude estimates in Euler angles representation, while compensating for rate gyro bias . Kalman filtering based techniques adopt a probabilistic .To accurately measure human motion at high-speed, we proposed a simple structure complementary filter, named the Fuzzy Tuned and Second EStimator of the Optimal Quaternion Complementary Filter (FTECF). The technology of magnetic and inertial measuring is a promising attitude determination method, mainly because of its merits that it does not resort to any man-made external references for .Hassen Fourati.The adaptive complementary lter is also derived on the special orthogonal group and convergence of the lter is established. 1 Introduction Orientation estimation using inertial and magnetometer measurements is by now a well-studied problem with applications in e.The MPU6050 sensor is one of the most popular sensors in this field.This paper proposes a foot-mounted zero velocity update (ZVU) aided inertial measurement unit (IMU) filtering algorithm for pedestrian tracking in indoor environment.With the development of smart sensing and the aging trend of the society, telerobot is playing an increasingly important role in the field of homecare service.Abstract and Figures.In this work an Inertial Measurement Unit is used to improve tool position estimates for an ABB IRB 4600 industrial robot, starting from estimates based on motor angle forward kinematics. A quaternion product is not . It works by detecting linear acceleration using accelerometers and rotational rate us-ing gyroscopes.observations, we propose a UWB/Inertial Measurement Unit (UWB/IMU) fusion filter based on a Complementary Kalman Filter to track the errors of position, velocity and direction. That is, there should be no dynamics between the true signal and the . By using the least .This paper describes the design, implementation, and preliminary testing of an inertial tracking system using a complementary filter based upon quaternions that is capable of tracking a rigid body through all orientations and is . On the other hand, the complementary lter achieves much better results, closely tracking the true pitch. Use of inertial measurement units for measuring torso and pelvis orientation, and shoulder–pelvis separation angle in the discus throw. Mahony et al [35] developed the complementary lter which is shown to be an e cient and e ective solution; however, performance is only validated for an IMU.out the design and experimental implementation of a complementary lter for inertial measurement.This paper presents a wearable inertial measurement system and its associated spatiotemporal gait analysis algorithm to obtain quantitative measurements and explore clinical indicators from the . human motion analysis [1, 2] and robotics [3, 4].This paper presents a modified complementary separate-bias Kalman filter for orientation determination of pedestrian motions by using a inertial measurement unit (IMU) module, which contains .
The sensor glove is based on inertial measurement units (IMUs) with 9 axes. Finally, the results can be viewed on an IoT . Integration ofthe angular velocity measured by .32 CAN Newsletter 1/2020 An inertial measurement unit (IMU) is an electronic de-vice that measures and reports a body’s specific force, angular rate, and orientation. A nonlinear complementary filter is proposed that combines accelerometer output for low frequency attitude .By using normalized measurement/reference vector pairs, the gains k1 and k2 can be considered as the NLO’s complimentary filter cut-off frequencies. Therefore, a complementary filter is used and analysed in this research. It is a simple sensor in dealing with it and extracting .Finally, the results can be viewed on an IoT platform.

An inertial measurement unit (IMU) is an electronic device that measures and reports a body’s specific force, angular rate, and sometimes the orientation of the body, using a combination of accelerometers, gyroscopes, and sometimes magnetometers. For example, for two orientations described by A Bq^ and B Cq^, the compounded orientation A Cq^ can be de ned by equation (3). The idea of the complementary lter is that in the ab-sence of measurement noise the lter should be a perfect estimator.Typically, the complementary signals are measured by two kinds of sensors with the relationship of differentiation [23] – [24]. Meanwhile, the heading angle is calculated from the magnet measurements (bottom). IMUs are typically used to ., can be used to de ne compound orientations.Figure 10: Complementary Filter Results Figure 10 shows the results from the complementary lter compared to the gyroscope data alone.

The LGM-30 Minuteman in particular is notable for driving advances in both inertial measurement and the miniaturization of com- . INTRODUCTION Estimating the attitude of a rigid body based on sensor data from an Inertial Measurement Unit (IMU), consisting of (three-axes) .SP] 1 Oct 2019 Kalman lter. The wearable system is composed of a .
- Can Weather Change Cause Headaches?
- Campingplätze Für Zeltkinder Oberbayern
- Campus Für Christus Freiburg | Die Strategin und der Macher
- Calming Irish Music : 1 hour of Relaxing sound of Bagpipes, Mediation, Sleep
- Camping Ellmau Am Wilden Kaiser
- Call By Call Für Festnetz , Billig telefonieren nach Italien per Call by Call
- Can Emotional Abuse Escalate To Physical Violence?
- Camping Grav Insel Adac _ Camping an der Ostsee: Campingplätze & Angebote
- Canberra Sea Level | What is my elevation?
- Candesartan Heumann Wirkung – Candesartan: Krebsgefahr durch Sartane?